8.2 Резисторное (реостатное) торможение
При резисторном торможении тяговые электродвигателя отключаются от контактной сети, переводятся в генераторный режим и работают на тормозной реостат.
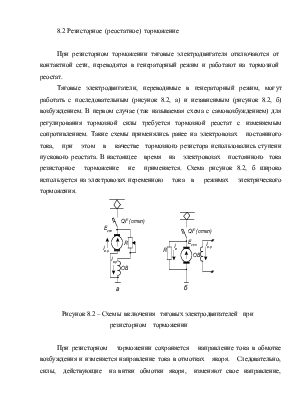
Тяговые электродвигатели, переводимые в генераторный режим, могут работать с последовательным (рисунок 8.2, а) и независимым (рисунок 8.2, б) возбуждением. В первом случае (так называемая схема с самовозбуждением) для регулирования тормозной силы требуется тормозной реостат с изменяемым сопротивлением. Такие схемы применялись ранее на электровозах постоянного тока, при этом в качестве тормозного резистора использовались ступени пускового реостата. В настоящее время на электровозах постоянного тока резисторное торможение не применяется. Схема рисунок 8.2, б широко используется на электровозах переменною тока в режимах электрического торможения.
Рисунок 8.2 – Схемы включения тяговых электродвигателей при резисторном торможении
При резисторном торможении сохраняется направление тока в обмотке возбуждения и изменяется направление тока в отмотках якоря. Следовательно, силы, действующие на витки обмотки якоря, изменяют свое направление, изменит свое направление и создаваемый ими момент сил. Если в моторном режиме тягового электродвигателя момент сил является вращающим, то в генераторном – тормозным (см. п. 2.1). Таким образом, тормозная сила электрического торможения имеет ту же природу, что и сила тяги.
ЭДС одного тягового электродвигателя, работающего в режиме резисторного торможения, В,
![]() (8.8)
(8.8)
где R – сопротивление тормозного реостата.
Из выражения (8.8) следует, что
 (8.9)
(8.9)
В схеме резисторного торможения электровоза может быть р параллельных цепей с л последовательно включенными тяговыми электродвигателями. В случае
![]() (8.10)
(8.10)
откуда скорость, км/ч,
 (8.11)
(8.11)
Как уже было отмечено, тормозная сила электрического торможения и сила тяги имеют одну и ту же природу. Следовательно, электромагнитная тормозная сила Вт.эм по абсолютному значению равна и противоположна по знаку электромагнитной силе тяги (см. п. 4), т. е.
![]() (8.12)
(8.12)
Следовательно,
![]() (8.13)
(8.13)
С учетом механических и магнитных потерь действительная тормозная сила тягового электродвигателя на ободе колеса
![]() (8.14)
(8.14)
При наличии n тяговых электродвигателей, на локомотиве результирующая электромагнитная тормозная сила, Н,
![]() (8.15)
(8.15)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.