Подставив (6) в (7), получим:
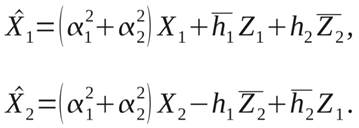 |
(8)
![]() Сигналы, полученные из выражения (8), поступают на
демодулятор, на выходе из которого решающее устройство принимает решение о том,
какой сигнал передавался с первой антенны, а какой со второй.
Сигналы, полученные из выражения (8), поступают на
демодулятор, на выходе из которого решающее устройство принимает решение о том,
какой сигнал передавался с первой антенны, а какой со второй.
Таким образом, на вход демодулятора поступает сигнал, усиленный в
При использовании двух передающих и двух приёмных антенн, сигнал на входе демодулятора будет иметь вид:
 |
(9)
(10)
Как видно из рассмотренных алгоритмов приёма, метод комбинирования сигналов при пространственно-временном кодировании можно характеризовать как сложение, максимизирующее отношение сигнал/шум. В общем виде лучи складываются с весом, прямо пропорциональным величине, комплексно сопряжённым с замирающим сигналом и обратно пропорциональным мощности шума в ветви разнесения.
В [1] приведены зависимости вероятности ошибки от отношения сигнал/шум при пространственно-временном кодировании для каналов с гладкими замираниями (полоса когерентности канала больше полосы сигнала). Поэтому в дальнейшем рассмотрим помехоустойчивость приведённых выше алгоритмов для сигналов ДОФМ для канала с частотно-селективными замираниями.
Сигнал на входе приёмника представим как
Y(f) = S(f)×H(f)+N(f),
где H(f) - случайная функция передачи канала, которая предполагается комплексным гауссовским процессом, поскольку комплексные гауссовские характеристики канала могут быть достаточно определены [3].
Корреляционную функцию процесса H(f) часто называют частотной корреляционной функцией и определяют как
(11)
Как показано в [4], для подвижных систем связи в условиях города выражение (11) имеет гауссовский характер:
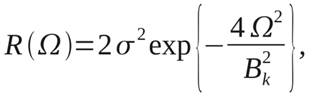 |
(12)
где Bk - полоса когерентности (интервал корреляции), определяемая на уровне 1/е,
![]() - средняя
мощность сигнала.
- средняя
мощность сигнала.
Функция задержек, определяемая как преобразование Фурье от (12):
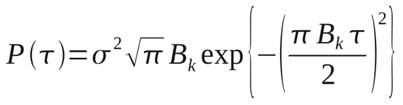 |
. (13)
Выражения (12) и (13) достаточно хорошо характеризуют канал, где определяющим параметром условий приёма является полоса когерентности Bk, при этом вид зависимости (13) в значительно меньшей степени влияет на помехоустойчивость системы с разнесением антенн.
Демодулятор сигналов ДОФМ представляет собой когерентный приёмник, на выходе из которого образуется сигнал:
 |
Вероятность ошибки [3] определяется как
 |
(14)
(15)
где М - порядок разнесения (M=n×m).
Отношение сигнал/шум определяется как
 |
(16)
где
Сигналы прямой и задержанный соответственно:
 |
(17)
(18)
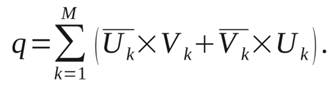
Момент mrs определяется как
(19)
где:
(20)
 |
||
 |
||
Если ввести величину
выражение (20) может быть приведено к виду
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.