











Министерство образования и науки Российской федерации
Федеральное агентство по образованию
Саратовский государственный технический университет
Балаковский институт, техники, технологии и управления
РАСЧЕТ ХАРАКТЕРИСТИК ДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА
Методические указания к выполнению практической работы
по дисциплине «Электромеханические системы» для студентов
специальности 220201 всех форм обучения
Одобрено
редакционно-издательским советом
Балаковского института техники,
технологии и управления
Балаково 2010
|
РАСЧЕТ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДПТ
НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
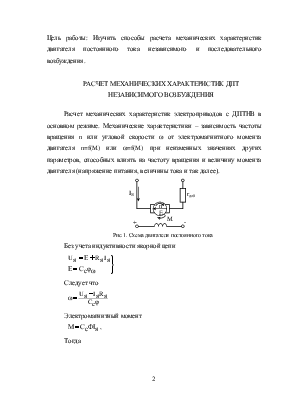
Расчет механических характеристик электроприводов с ДПТНВ в основном режиме. Механические характеристики – зависимость частоты вращения n или угловой скорости ω от электромагнитного момента двигателя n=f(M) или ω=f(M) при неизменных значениях других параметров, способных влиять на частоту вращения и величину момента двигателя (напряжение питания, величины тока и так далее).
Рис.1. Схема двигателя постоянного тока
Без учета индуктивности якорной цепи
|
|
Следует что
|
|
Электромагнитный момент
|
|
Тогда
|
|
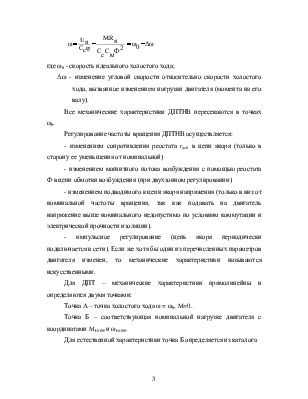
где ω0 - скорость идеального холостого хода;
Δω - изменение угловой скорости относительно скорости холостого хода, вызванное изменением нагрузки двигателя (момента на его валу).
Все механические характеристики ДПТНВ пересекаются в точках ω0.
Регулирование частоты вращения ДПТНВ осуществляется:
- изменением сопротивления реостата rдоб в цепи якоря (только в сторону ее уменьшения от номинальной)
- изменением магнитного потока возбуждения с помощью реостата Ф в цепи обмотки возбуждения (при двухзонном регулировании)
- изменением подводимого к цепи якоря напряжения (только в низ от номинальной частоты вращения, так как подавать на двигатель напряжение выше номинального недопустимо по условиям коммутации и электрической прочности изоляции).
- импульсное регулирование (цепь якоря периодически подключается к сети). Если же хотя бы один из перечисленных параметров двигателя изменен, то механические характеристики называются искусственными.
Для ДПТ – механические характеристики прямолинейны и определяются двумя точками:
Точка А – точка холостого хода ω = ω0, M=0.
Точка Б – соответствующая номинальной нагрузке двигателя с координатами MНОМ и ωНОМ.
Для естественной характеристики точка Б определяется из каталога
|
|
|
|
|
Для точки А скорость холостого хода
|
|
|
|
|
Для построения искусственной характеристики точки Б рассчитывается число оборотов
|
|
1 – естественная характеристика при rдоб1=0
2; 3 – искусственные характеристики при rдоб1>0 rдоб2>0, и при rдоб3>rдоб4
Рис.2. Естественная и искусственные механические характеристики
При расчете механических характеристик обычно решают одну из двух задач:
1) По заданным координатам точки на искусственной механической характеристики при номинальной нагрузке с координатами MНОМ и nНОМ определяют сопротивление резистора M, в соответствующее этой искусственной характеристики.
2) По заданным значениям сопротивления резистора M и тока якоря IЯНОМ, соответствующего номинальной нагрузке двигателя, определяют частоту вращения якоря двигателя и строят искусственную механическую характеристику.
Задача 1: ДПТНВ имеет номинальные данные:
- мощность РНОМ=42кВт;
- напряжение UНОМ=440В;
- частота вращения nНОМ=3000об/мин;
- сопротивление обмоток цепи якоря RЯ=0,17Ом;
- КПД ηНОМ=90,5%.
Требуется определить сопротивление резистора rдоб, который следует включить последовательно в цепь якоря, чтобы при номинальном моменте нагрузки MНОМ частота вращения была n’НОМ=0,5 nНОМ об/мин.
Решение:
1) Ток якоря в номинальном режиме:
|
|
2) Пограничная частота вращения:
|
|
3) Номинальный момент на валу двигателя:
|
|
4) Координаты точки номинального режима на естественной механической характеристики:
|
|
|
|
|
5) Номинальное сопротивление двигателя:
|
|
6) Сопротивление резистора M, соответствует искусственной механической характеристике с координатой частоты вращения:
|
|
|
|
|
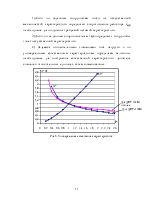
7) Механические характеристики ЭП с рассматриваемым двигателем на рис.3:
Рис.3. Естественная и искусственная механические характеристики
![]() На рис.3 цифрой 1 обозначена естественная
характеристика, а цифрой 2 искусственная характеристика. В режиме искусственной
механической характеристики вводится понятие номинального сопротивления,
представляющего собой сопротивление RНОМ,
каким должна обладать цепь якоря двигателя, чтобы при подведенном к
неподвижному якорю напряжении UНОМ ток в
цепи якоря был бы номинальным IЯНОМ:
На рис.3 цифрой 1 обозначена естественная
характеристика, а цифрой 2 искусственная характеристика. В режиме искусственной
механической характеристики вводится понятие номинального сопротивления,
представляющего собой сопротивление RНОМ,
каким должна обладать цепь якоря двигателя, чтобы при подведенном к
неподвижному якорю напряжении UНОМ ток в
цепи якоря был бы номинальным IЯНОМ:
|
|
Задача 2: Рассчитать координаты необходимые для построения естественной и искусственной механической характеристики ДПТНВ типа ПБС-62, если внешнее сопротивление в цепи якоря rдоб=2,4Ом.
(Для данной задачи немного увеличьте добавочное сопротивление, рассчитанное в задаче 1).
Номинальные данные двигателя:
- мощность РНОМ=4,7кВт;
- напряжение UНОМ=220В;
- частота вращения nНОМ=1000 об/мин;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 ;
; .
. ;
; .
. .
.