Однако могут возникнуть (хотя и редко) такие ситуации, когда технолог переходит на другой режим работы агрегата, связанный с повышением числа оборотов двигателя, а следовательно, и величины полезного сигнала на входе усилителя, и одновременно уменьшает уровень заполнения мельницы рудой. Это приведет к еще большему увеличению сигнала на входе усилителя и он может выйти за пределы его линейной зоны, т.е. войти в зону насыщения усилителя. Как видим, в таком режиме работы системы ее линейная модель не отражает всех свойств реальной системы.
Можно рассмотреть и случай малых входных сигналов, когда его уровень лежит в пределах зоны нечувствительности усилителя или тахогенератора. И в этом случае линейная модель не адекватна реальной системе, работающей в режиме малых входных сигналов. В режимах больших и малых входных сигналов систему целесообразно описывать нелинейной моделью. Так, в рассматриваемом примере структурная схема примет вид рис. 4.
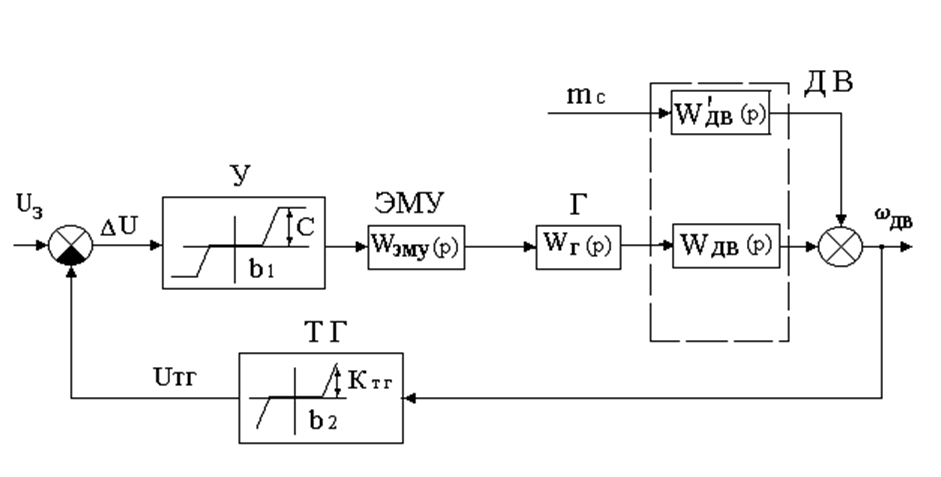
Рис.4 Структурная схема модели САР скорости вращения мельничного агрегата в режиме малых и больших входных сигналов.
Аналогичная ситуация может возникнуть и при наличии помех в системе. Происходит так называемый эффект "забивания" усилительного тракта помехой, что приводит к необходимости введения в контур системы оглаживающих фильтров.
Естественно, встает вопрос, какую из моделей системы принять как основную для расчета. В данном примере казалось бы правильным выбрать нелинейную модель, как наиболее полно отражающую процессы в системе. Однако, как уже отмечалось, это приведет к резкому усложнению расчетов, поскольку придется использовать методы теории нелинейных систем. Поэтому, учитывая, что линейная модель описывает основной (наиболее вероятный) режим работы системы, ее можно принять как основную для синтеза системы стабилизации в окрестности этого рабочего режима, а затем, когда линейная САР будет разработана, исследовать поведение в режимах малых и больших входных сигналов.
Итак, в рассматриваемом примере за основную принимается линейная модель. Описание функциональных элементов системы широко приводится в литературе [1-4.], а также проводилось в рамках курсовой работы по курсу "Теоретические основы кибернетики" и принципиалъных трудностей не должно вызывать. В данной работе передаточные функции записываются без вывода, указывается лишь ссылка на источник, откуда они взяты.
Структурная схема системы стабилизации скорости привода мельничного агрегата примет вид рис. 5.

Рис. 5. Структурная схема САР скорости вращения мельничного агрегата
Следует обратить внимание на численные значения постоянных времени функциональных элементов, приводимых в исходных данных, и, если есть постоянные, существенно отличающиеся друг от друга (более чем на два порядка), можно понизить порядок такой системы без потери ее динамических свойств.
Так, в данном примере такими
постоянными являются ![]() электромашинного
усилителя и
электромашинного
усилителя и ![]() двигателя.
Структурная схема может быть упрощена до вида рис. 6.
двигателя.
Структурная схема может быть упрощена до вида рис. 6.
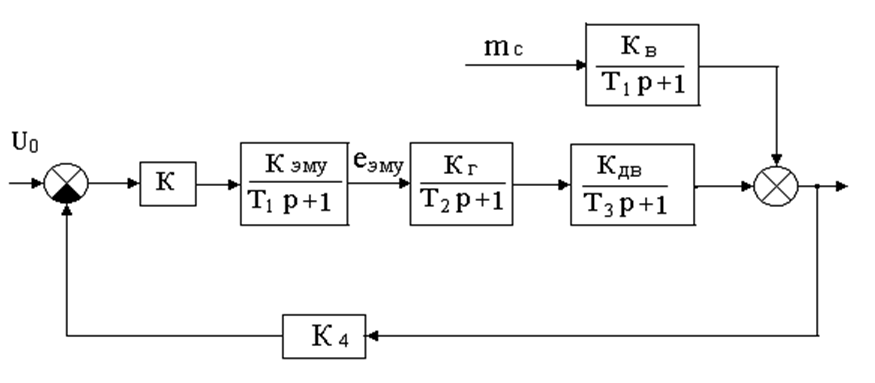
Рис. 6. Упрощенная структурная схема САР скорости вращения мельничного агрегата
В заключение этого этапа (если это необходимо) целесообразно привести структурную схему системы к схеме с единичной обратной связью, так как методы, применяемые в инженерных расчетах, рассчитаны на системы с единичной отрицательной связью, чт о позволяет при д ать этим ме т одам некотор ую общност ь примене н ия для целого кла с са. Такое преобразо в ание не вызывает трудностей, так как обратная с вязь ж есткая, и перене с ение звена в обратной связи в пряму ю цепь соответ с твует лишь некоторому мас ш табированию, так как выходной величиной теперь является измеряемая с помощью датчика истинная выходная переменная си стемы.
В примере с САР с коро с ти
вращения мел ь ницы после переноса тахогенератора в прям у ю цепь выходной
переменной с и с темы являет с я уже напряжение тахогенератора ![]() .
.
Структурная схема примет вид рис. 7.
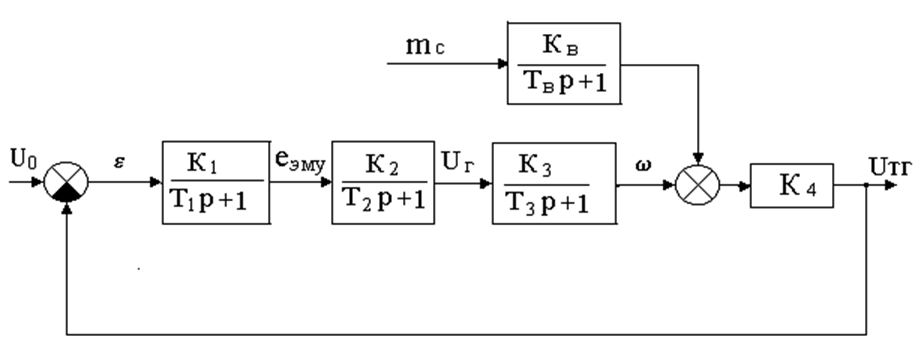
Рис. 7. Преобразованная структурная схема САР скорости вращения мельничного агрегата
В результате формализации задачи в пояснит е льной записке на основе содержател ь ного анализа исходной схемы должна быт ь приведена аргументированная классификация сис т емы, обо с нованный выбор типа математической модели, описа н ие ее функциональных элементов и, е с ли это возмо ж но, ее упрощение.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.