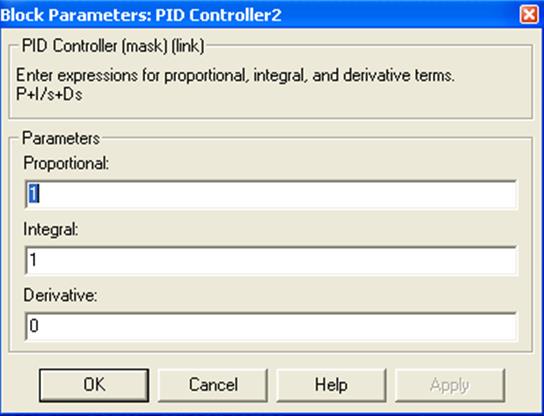
Рис.6. Окно настройки блокаPID Controller
Для согласования опорного напряжения системы регулирования с сигналами в системе необходимо предусмотреть два усилительных звена GainиGain1.Их настройка осуществляется из следующих соображений.
Для внутреннего контура тока перед регулятором необходимо сформировать сигнал UЗТ:
![]() .
.
Для внешнего контура тока перед регулятором - сигнал UЗС:
![]() .
.
Для регистрации выходных сигналов в системе используется блок Sсope. Форматирование графиков в окне Scope осуществляется после выполнения в командной строке Matlab следующих команд:
set(0,'ShowHiddenHandles','On')
set(gcf,'menubar','figure').
Модель рис.2 является общей. Для получения характеристик системы без учета тех или иных блоков они удаляются из системы. Для получения характеристик системы при различных структурах системы наглядно отображать переходные характеристики на одном графике. С этой целью может быть использован блок Mux из библиотеке Simulink / SignalRouting, в окне настройки которого указывается необходимое количество входных сигналов, размещаемых на одном графике Sсope.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Реализовать модель двигателя и получить временные характеристики по каналу для угловой скорости и тока якоря. Момент сопротивления задать согласно таблице
|
Время, с |
0 |
1 |
2 |
|
Амплитуда, Н·м |
0 |
≈0,5· Мн |
Мн |
3. Реализовать модель электропривода и получить временные характеристики для угловой скорости и тока якоря. Сравнить их с характеристиками двигателя. Сделать выводы.
4. К имеющимся моделям добавить модель электропривода с регулятором тока и получить временные характеристик. Сделать сравнение и выводы.
5. К имеющимся моделям добавить модель электропривода с П- и ПИ-регуляторами скорости отдельно. Получить характеристики, сделать выводы.
6. Составить отчет по работе.
ПРИМЕР ВЫПОЛНЕНИЯ ЗАДАНИЯ
Исходные данные
Для моделирования используются исходные и данные и результаты расчета для системы управления электроприводом из изученной ранее практической работы «Расчет системы управления электроприводом с подчиненным регулированием координат».
Решение
1. Модель двигателя представлена на рис.7, а окно настройки момента сопротивления на рис.8.
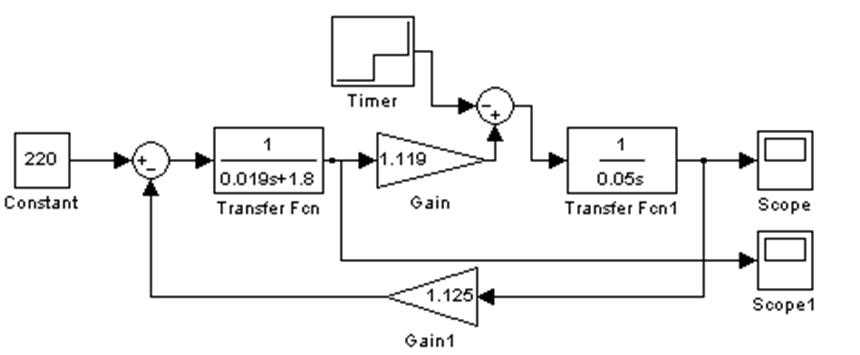
Рис.7. Модель двигателя
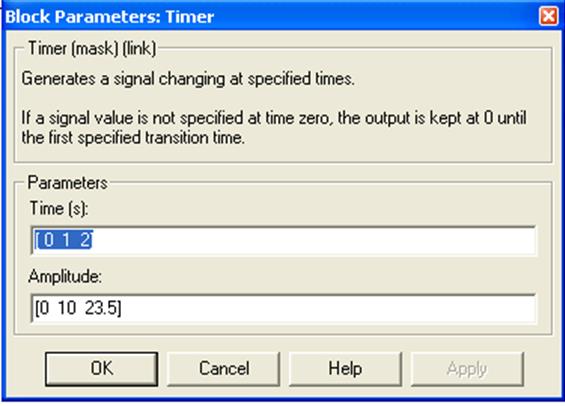
Рис.8. Окно настройки блока, реализующего момент сопротивления
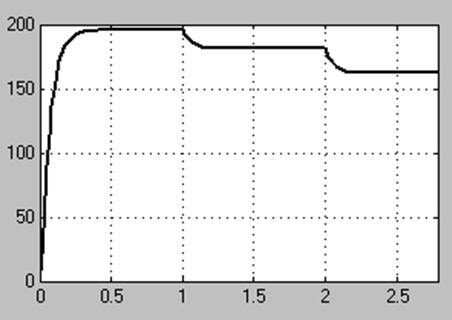
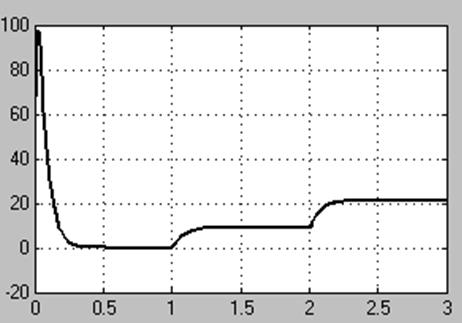
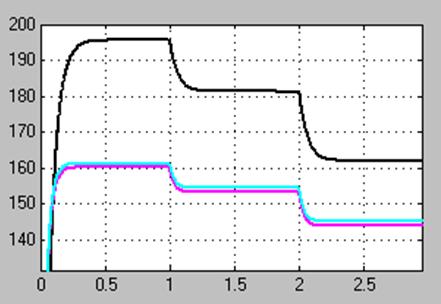
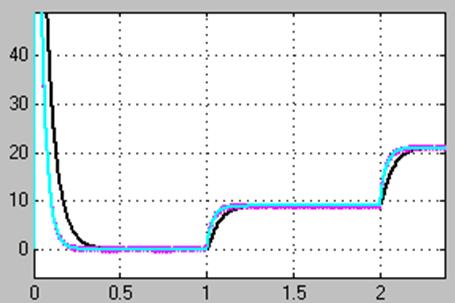
Графики изменения угловой скорости и тока якоря представлены на рис.9,10. На временном интервале [0,1] с, когда момент сопротивления равен 0, что соответствует режиму холостого хода, угловая скорость равна 196 с-1, а ток якоря – 0А. После момента времени 2 с, когда момент сопротивления равен Мн, что соответствует номинальному режиму работы, угловая скорость равна 162 с-1, а ток якоря – 21А. Скорость холостого хода расчетным путем совпадает:
 с-1.
с-1.
|
|
|
|
Рис.9. Графики изменения угловой скорости и тока якоря для модели двигателя |
|
|
|
|
|
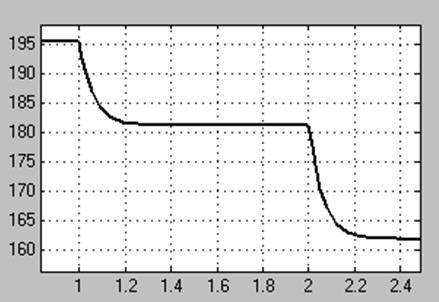
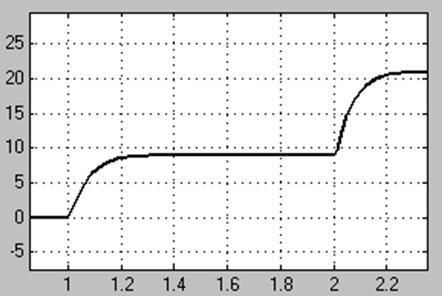
Рис.10. Графики изменения угловой скорости и тока якоря для модели двигателя (увеличено) |
|
Время переходного процесса для угловой скорости tω≈0,2 с, а для тока якоря также tI≈0,2 с.
2. Рассчитаем корректирующие коэффициенты:
![]() .
.
![]() .
.
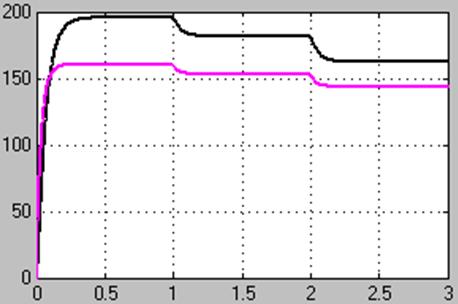
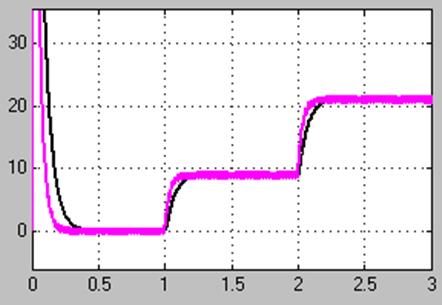
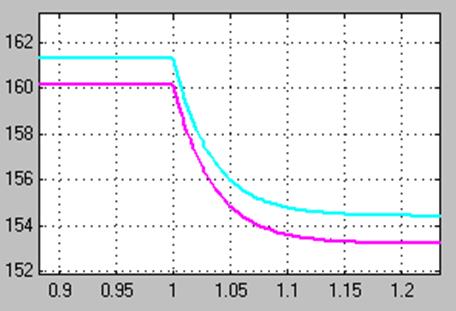
Модель двигателя и электропривода с двумя обратными связями представлена на рис.11, а графики изменения скорости и тока якоря на рис.12,13. Индексом 1 обозначены графики модели двигателя, 2 – модели электропривода.
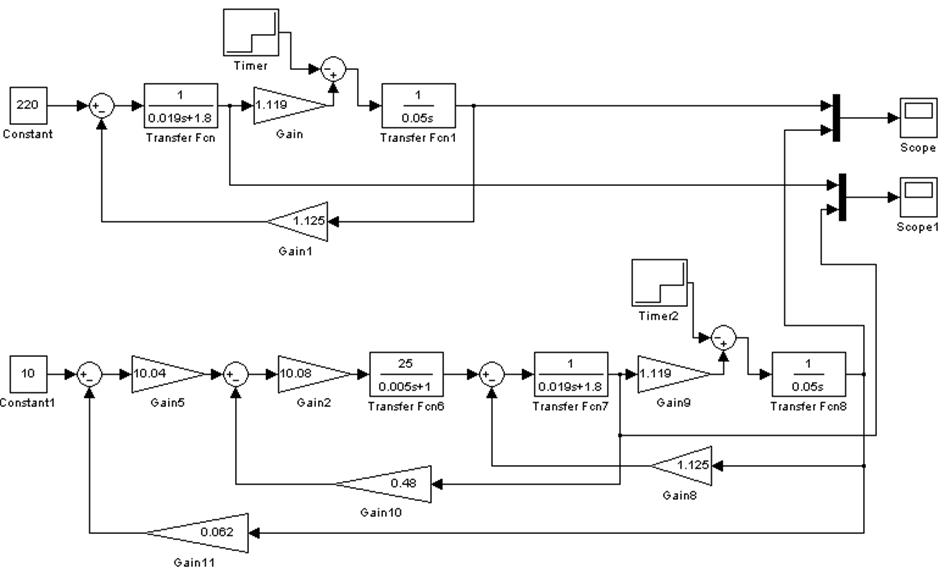
Рис.11. Модель двигателя и электропривода с двумя обратными связями
|
|
|
|
Рис.12. Графики изменения угловой скорости и тока якоря двигателя и электропривода |
|
|
|
|
|
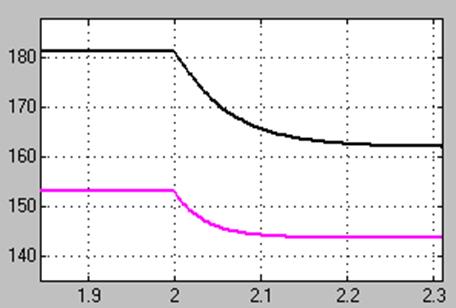
Рис.13. Графики изменения угловой скорости и тока якоря двигателя и электропривода (увеличено) |
|
Для угловой скорости появилась статическая ошибка, которая для номинального режима равна:
![]() с-1.
с-1.
Для тока якоря статической ошибки не наблюдается.
Проанализируем динамические показатели. Время переходного процесса для тока и скорости при организации обратных связей несколько уменьшилось и приблизительно равно 0,1с.
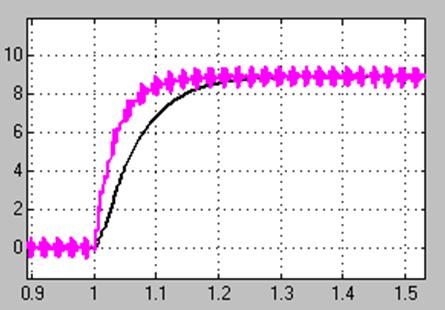
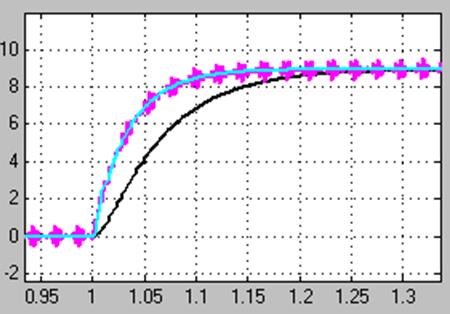
3. Рассмотрим модель, в которой двум предшествующим добавлена модель электропривода с регулятором тока (на рис. не представлена, разрабатывается самостоятельно). Графики изменения скорости и тока в этом случае представлены на рис.14, 15. Обозначения индексов: 1 – двигатель, 2 – электропривод, 3 – электропривод с регулятором тока.
|
|
|
|
Рис.14. Графики изменения угловой скорости и тока якоря двигателя, электропривода с обратными связями и электропривода с регулятором тока |
|
|
|
|
|
Рис.15. Графики изменения угловой скорости и тока якоря двигателя, электропривода с обратными связями и электропривода с регулятором тока (увеличено) |
|
Изменения в результате присутствия регулятора тока согласно рис.15 следующие:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.