D2 = p( xÎ d / z Îd ); (2.2.8)
где x и z - соответственно измеренное и истинное значения параметра;
d - поле допуска на значения параметра.
|
|
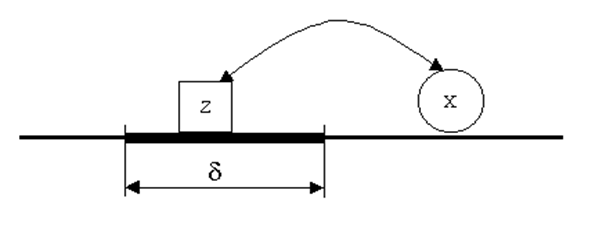
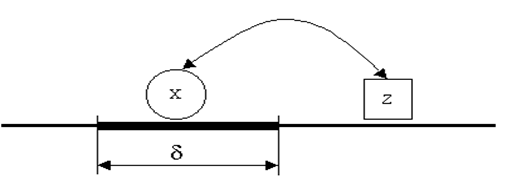
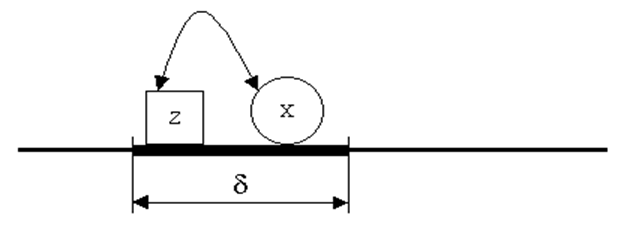
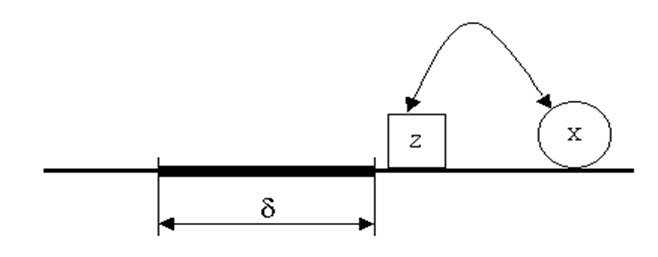
б) ошибка второго рода
|
|
г) вторая достоверность
Рисунок 2.2.1 – Возможные исходы при двухальтернативном решении.
Разобьем множество возможных истинных значений контролируемого параметра на две области m1 и m2. Область m1 включает значение параметра, находящегося в допуске, а m2- не в допуске. Тогда вместо (2.2.5) - (2.2.8) можно записать:
a = p(g2 /m1); b = p(g1 /m2); D1 = p(g1 /m1); D2 = p(g2 /m2); (2.2.9)
Из (2.2.9) следует для полных групп событий следующая связь между точностными характеристиками:
a + D1=1; b + D2= 1; (2.2.10)
Кроме того, вероятность принятия ошибочного решения на основании теоремы о полной вероятности равна:
PОШ= p(m1)a + p(m2)b , (2.2.11)
а вероятность принятия правильного решения -
PПР = p(m1)D1 + p(m2) D2 , (2.2.12)
Выразив
апостериорные вероятности p(gm /ml) через априорные по формуле Байеса:  (2.2.13)
(2.2.13)
и обозначив p(m1) = p1 и p(m2) = p2 с учетом (2.2.5) - (2.2.8) получим:


 (2.2.14)
(2.2.14)
После подстановки (2.2.14) в (2.2.4) при p1= p2=0.5 получим формулу для вычисления количества средней условной информации по точностным характеристикам СППР при двухальтернативном решении:
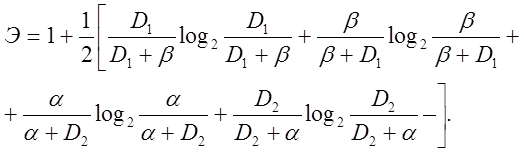 (2.2.15)
(2.2.15)
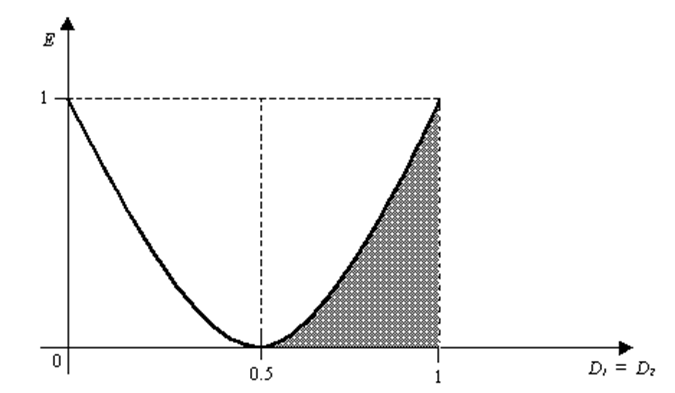
В общем случае, характеризующем процесс принятия решений, построенный на основании (2.2.15) график функции Э представляет поверхность в трехмерном пространстве.
На рисунке 2.2.2 показано сечение этой поверхности по биссектрисе D1ОD2 угла. Кривая получена при p1=0.6 и p2 =0.4. При этом функция Э является неоднозначной. На практике эту неоднозначность можно обойти, ограничившись изменением достоверностей в интервале [0.5;1], определяющем рабочую область. Как видно из рисунка 2.2.2 в рабочей (заштрихованной) области количество информации увеличивается с увеличением достоверностей.
|
Рисунок 2.2.2 - Сечение поверхности информационного критерия (D1=D2).
Именно в этой области экстремальные значения параметров обучения, соответствующие максимуму критерия, являются оптимальными в информационном смысле.
На практике точностные характеристики заменяются эмпирическими частотами. Для двухальтернативного решения введём следующие оценки точностных характеристик:
 (2.2.16)
(2.2.16)
где K1 и K3 число событий, заключающийся в нахождении значения параметра вне поля допусков и в поле допусков соответственно при условии, что истинное значение параметра находится в поле допусков; K2 и K4 - число событий, заключающихся в нахождении измеренного значения параметра в поле допусков и вне поля допусков соответственно при условии, что истинное значение параметра находится вне поля допусков; n - число испытаний. На основании (2.2.15) с учетом (2.2.16) формула (2.2.4) примет вид:
ЭI=
 . (2.2.17)
. (2.2.17)
Таким образом, информационный критерий (2.2.17), являясь функционалом точностных характеристик, прямо характеризует эффективность функционирования СППР в зависимости от нахождения контролируемых параметров (признаков) в своих эксплуатационных и контрольных допусках.
Для нахождения максимального значения критерия Э, строится гиперсфера с центром в вершине эталонного вектора для текущего класса, радиус d которой увеличивается от 0 до тех пор, пока текущее значение Э, не станет меньше его предыдущего значения. Для каждого значения d вычисляется расстояние (путем сложения по модулю 2) между эталонным вектором и каждой реализацией для текущего класса, а также для класса, ближайшего к текущему. В зависимости от значения кодового расстояния, получает приращение один из коэффициентов К1, К2, К3, K4 (для ближайшего к текущему класса). После определения этих коэффициентов вычисляется Э, по формуле (2.2.17). В случае, если текущее значение Э меньше предыдущего (Эдред), Эдред считается максимальным значением информационного критерия. В противном случае вычисления повторяются для радиуса, увеличенного на единицу. Значение d, соответствующее наибольшему Э, является радиусом разделяющей гиперповерхности для данного класса.
Однако существуют ситуации, в которых максимальное значение критерия является неинформативным, например, нахождение максимально удалённого в информационном смысле класса. В таких случаях используется площадь рабочей области критерия. Алгоритм её вычисления схож с алгоритмом нахождения максимального значения с той разницей, что производится суммирование всех значений критерия в рабочей области.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.