Измерение давления и перепада давлений
Давление. В энергетической установке судна давление измеряют в очень широком диапазоне. Воспринимают давление, как правило, упругие и эластичные ЧЭ, деформирующиеся под действием силы от давления среды. Эта сила обычно уравновешивается силой действия пружины СУ. Для измерения малых давлений применяют плоские эластичные и жесткие мембраны (рис.1,а). Эластичные мембраны изготавливают из аэростатной ткани или дюритовой резины. Ограниченно распространены жесткие мембраны, изготовленные из нержавеющей стали и бериллиевой бронзы, недостатком которых является малый диапазон перемещения. Для увеличения хода применяют мембраны с гофром, направленным вогнутостью в стороны измеряемого давления (рис. 1, б).
где fа — часть площади мембраны, передающая усилие и называемая активной площадью.
 |
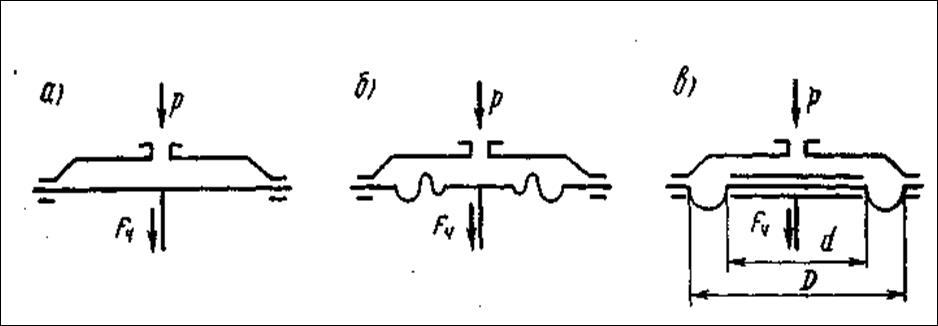 |
Рис.1 Схемы действия мембранных чувствительных элементов давления.
Закономерность
работы измерительных устройств в статических и динамических режимах выясним на
примере мембранного датчика давления. Входным сигналом датчика (рис. 2,
а) является давление р измеряемой среды, а выходным — положение рычага АВ,
определяемое перемещением Дг/д точки А. При
установившемся режиме сила F4, действующая на
мембрану от давления среды, уравновешивается суммой сил Fпдействия пружины
4 и сухого трения Fтp в звеньях датчика:![]()
Сила ftpстремится
затормозить движение звеньев датчика, действуя с положительным знаком при
увеличении силы Fчи с отрицательным
при ее уменьшении (для упрощения в дальнейшем влиянием сил сухого трения будем
пренебрегать). Тогда соотношение между силами Fчи Fпдля момента
страгивания жесткого центра мембраны 2 с упора 6![]()
Где pomin,fа — давление страгивания и активная площадь мембраны;
С, zo— жесткость и предварительное натяжение пружины.
Жесткость — это сила, необходимая для деформации пружины на единицу длины. Для цилиндрических пружин жесткость постоянна и зависит только от геометрических размеров, числа работающих витков и упругости материала.
Предварительное натяжение zo пружины 4 устанавливают вращением регулировочной гайки 3 относительно корпуса 1 датчика.
Из соотношения следует, что для каждого датчика давление страгивания мембраны с ограничительного упора пропорционально предварительному натяжению z0 пружины:
 (I)
(I)
 |
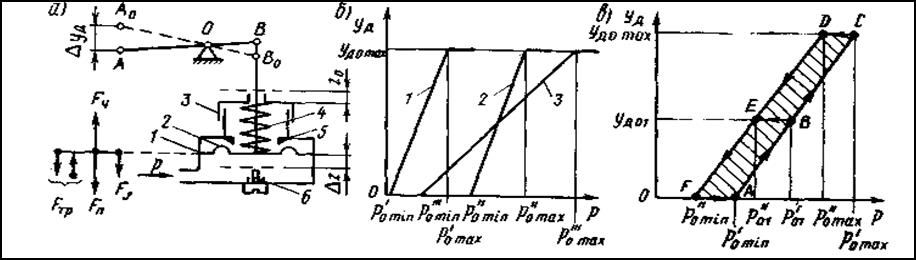 |
Рис.2 Схемы действия мембранного датчика давления и его характеристики.
Уравнения динамики характеризуют линейную, пропорциональную зависимость изменения выходной величины от входной при условии малых приращений измеряемого параметра, а соотношение между ними определяется передаточным коэффициентом. Так, с увеличением жесткости с либо уменьшением площади fа или передаточного числа а1 передаточный коэффициент ал уменьшается, что приводит к уменьшению выходного сигнала датчика при том же изменении входного.
На установившемся режиме статическое приращение давления Д/7„ приводит к пропорциональному перемещению Л«/до выходного звена. Поэтому работа датчика на установившихся режимах также описывается зависимостями (2) и (3). Выходной сигнал достигает своего максимального установившегося значения А#ДОтах, когда жесткий центр мембраны 2 достигнет ограничительных упоров 5 при увеличении давления до значения р0тах- Тогда разность установившихся давлений при крайних положениях выходного звена датчика определит значение его статической неравномерности:
или
 (4)
(4)
В общем случае статической
неравномерностью (∆хнер) звена называется разность
установившихся значений входного параметра, взятых при крайних значениях
выходного параметра и неизменном задании R, т. е.![]()
Показателем относительной неравномерности звена является степень неравномерности звена, %:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.