Осуществляют компенсацию дестабилизирующего фактора за счёт обратной связи, воздействующей на регулирующий элемент в направлении уменьшения возмущающего воздействия (рис. 51).
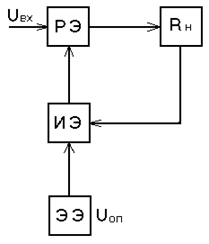
Рис. 51 - Структурная схема стабилизатора компенсационного типа
Принцип действия: изменение напряжения на нагрузке передаётся на специально вводимый в схему регулирующий элемент (РЭ), препятствующий изменению напряжения на нагрузке. Воздействие на РЭ осуществляется управляющей схемой, в которую входят измерительный элемент (ИЭ) и источник эталонного напряжения (ЭЭ). С помощью ИЭ производится сравнение напряжения на нагрузке с эталонным напряжением.
Лекция № 7
Стабилизаторы компенсационного типа непрерывного действия бывают:
1. Стабилизатор последовательным соединением регулирующего элемента
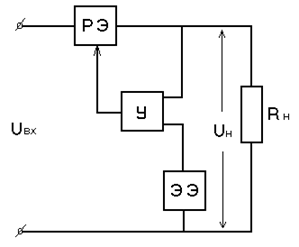
Рис. 52 - Структурная схема стабилизатора непрерывного действия
с последовательным включением регулирующего элемента
Стабилизация напряжения нагрузки осуществляется путём изменения напряжения на регулирующем элементе. Ток регулирующего элемента равен току нагрузки. Усилитель (У) усиливает разность (Uээ – Uн) и подаёт её на регулирующий элемент.
Принципиальная схема стабилизатора напряжения компенсационного типа с последовательным соединением регулирующего элемента приведена на рис. 53.
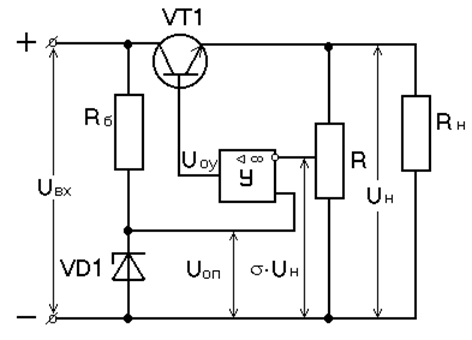
Рис. 53 - Схема стабилизатора напряжения компенсационного типа
с последовательным соединением регулирующего элемента
Устройство схемы:
Транзистор VT1 служит регулирующим элементом. Источником опорного напряжения служит стабилизатор параметрического типа с Rб и стабилитроном VD1. Силовая цепь стабилизатора, включая источник питания, VT1 и Rн представляет собой усилительный каскад на транзисторе VT1 с общим коллектором, в котором Uвх – напряжение питания, Uоу – входное напряжение, Uн – выходное напряжение.
Принцип действия:
Стабилизирующее действие схемы обусловлено наличием в ней глубокой отрицательной обратной связи по приращениям выходного напряжения Uн.
В данной схеме Uн = Uвх – UkVT1.
Изменение Uвх на DUвх приводит к изменению DUн = DUвх - DUkVT1, где
DUkVT1 = DUбVT1 × KVT1 = DUвых.оy × KVT1 = DUвх.oy × KVT1 × Koy = s × DUн × KVT1 × Koy,
где  - определяет уровень стабилизации
выходного напряжения (рис. 53).
- определяет уровень стабилизации
выходного напряжения (рис. 53).
Следовательно, DUн = DUвх - DUн × s × KVT1 × Koy. Отсюда получаем:
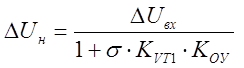
Kст = l(1 + s × KVT1 × Koy) – коэффициент стабилизации.
Задачу регулирования уровня стабилизации выходного напряжения решают путём введения во входную цепь усилителя потенциометра R.
Достоинства:
1. Кст > 1000 (высокий коэффициент стабилизации).
2. Безынерционность.
3. Малое внутреннее сопротивление.
Недостатки:
1. Низкий КПД (не более 0,5 ¸ 0,6).
2. Сложность схемы (следовательно, уменьшение надёжности).
3. Высокая стоимость (по сравнению с параметрическими стабилизаторами).
3. Стабилизатор с параллельным соединением регулирующего элемента
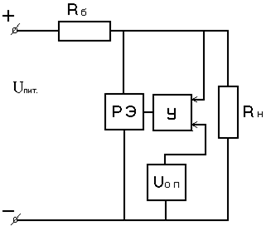
Рис. 54 - Структурная схема стабилизатора непрерывного действия
с параллельным включением регулирующего элемента
Стабилизация напряжения на нагрузке достигается, как и в параметрическом стабилизаторе, изменением напряжения на балластном резисторе Rб путём изменения тока регулирующего элемента. Изменение тока нагрузки от нуля до Iн max, будет сопровождаться соответствующим изменением тока регулирующего элемента от Iн max до нуля. Мощность, теряемая в данной схеме складывается из потерь на резисторе Rб и регулирующем элементе, в то время как в схеме на рис. 53 мощность теряется только на регулирующем элементе. Таким образом, энергетические показатели (КПД) параллельных стабилизаторов более низкие, чем у последовательных. Поэтому последовательные стабилизаторы нашли набольшее применение на практике.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.