4 ИСПОЛЬЗОВАНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДЛЯ ПРОВЕДЕНИЯ ИССЛЕДОВАНИЙ
4.1 Оценивание адекватности математической модели
Так как проведение натуральных экспериментов для данного объекта исследований довольно затруднительно и требует наличия соответствующей лабораторной базы, то оценивание адекватности математической модели будем производить исходя из обработки данных полученных из литературных источников посвящённых данной проблеме.
Проведя моделирование, можем оценить и сопоставить значения таких показателей, как время переходного процесса, перерегулирование, установившееся значение выходной величины.
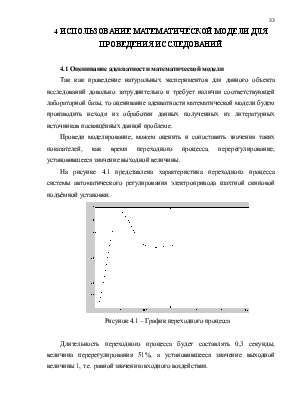
На рисунке 4.1 представлена характеристика переходного процесса системы автоматического регулирования электропривода шахтной скиповой подъёмной установки.
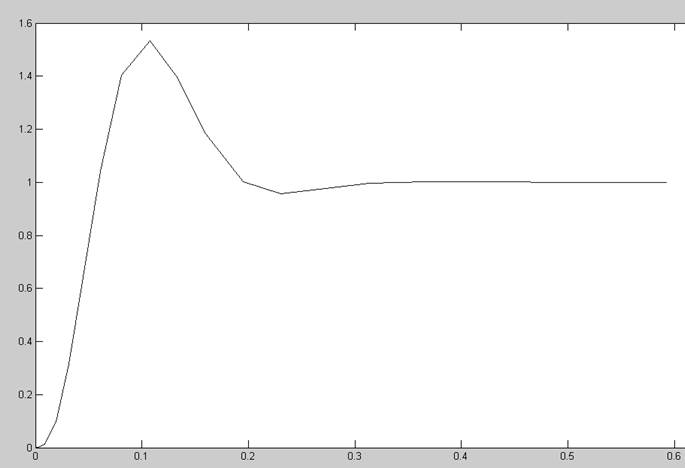
Рисунок 4.1 – График переходного процесса
Длительность переходного процесса будет составлять 0,3 секунды, величина перерегулирования 51%, а установившееся значение выходной величины 1, т.е. равной значению входного воздействия.
Исходя из полученных параметров, можно сделать вывод, что данная математическая модель полностью удовлетворяет условиям для проектирования и реализации системы автоматического регулирования электропривода шахтной скиповой подъёмной установки.
4.2 Оптимизация исследуемого объекта
Как было ранее сказано, нам необходимо повысить эффективность и надежность работы электропривода шахтной скиповой подъёмной установки. Для реализации данной задачи проведём исследование данной модели на другом типе регулятора, т.к. модернизация данного узла системы несёт наименьшие затраты и не влечёт замены механических узлов и агрегатов шахтной скиповой подъёмной установки.
4.2.1 Расчёт параметров П-регулятора скорости
Передаточный коэффициент тахогенератора:
ЭДС тахогенератора при номинальных оборотах двигателя:

Коэффициент обратной связи по скорости:

 - передаточная функция П-регулятора
скорости
- передаточная функция П-регулятора
скорости
Максимальное ограничивающее напряжения для VD1 и VD2 рассчитываем по следующей формуле:
![]() В.
В.
Рисунок 4.2 - Упрощённая принципиальная схема П-регулятора скорости
В связи с тем, что нам требуется найти передаточную функцию разомкнутого контура по управляющему воздействию, то возмущающее воздействие (МС) можно считать равным нулю. Таким образом, конечная передаточная функция разомкнутого контура скорости имеет следующий вид:
На рисунке 4.3 представлена характеристика переходного процесса системы автоматического регулирования электропривода шахтной скиповой подъёмной установки на базе иного типа регулятора.

Рисунок 4.3 – График переходного процесса
Длительность переходного процесса будет составлять 0,2 секунды, величина перерегулирования 7,1%, а установившееся значение выходной величины 1, т.е. равной значению входного воздействия.
Данный тип регулятора имеет наиболее стабильные и быстродействующие характеристики, что благоприятно скажется на всей системе автоматического регулирования электропривода шахтной скиповой подъёмной установки.
Применение данного типа регулятора предполагает модернизацию только управляющей части системы, а именно регулятора скорости.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.