













8. Автоматизация очистных и подготовительных работ.
1. Аппаратура автоматизации управлением комбайна и механизированной крепью……………………………………………………………………………….
2. Аппаратура автоматизации участкового транспорта………………………….
3. Аппаратура автоматизации проветривания шахты……………………………
4. Система оперативно-диспетчерского управления шахтой……………………
1. Аппаратура автоматизации управлением комбайна и механизированной крепью.
Задачи для систем автоматизированного управления комбайном механизированной крепью:
1) Главная задача – обеспечение максимальной интегральной производительности технологического комплекса при себестоимости 1т не выше заданной;
2) Подчиненные ей задачи;
3) оптимизация режима разрушения по критерию минимальной интенсивности исчерпания технического ресурса. Важными являются критерии сортности угля и пылеобразования, соответствующие минимальной удельной энергоемкости резания угля
4) Снижение амплитуды колебаний моментов и скоростей в приводах разрушения горных пород и перемещения машин;
5) Снижение скорости резания до взрывоопасного уровня при резании крепких пород и включений;
6) Ограничение медленных и защита от опасных экстренных механических перегрузок;
7) Выравнивание нагрузки между приводами;
8) Регулирование текущей производительности технологического комплекса на максимально допустимом по концентрации метана уровне;
9) Обеспечение направленного движения угледобывающей машины и агрегата.
Во II разделе дипломного проекта "Комплексная механизация" был выбран комбайн KGS-345. Этот комбайн оснащен электронной системой автоматизации управления и диагностики.
Система обеспечивает соответственную предупредительную сигнализацию, а так же в случае превышения допускаемых значений определенных параметров, которые могут вызвать повреждение комбайна, выключает подачу или питание комбайна. Диагностические параметры высвечиваются на мониторе, в состав которого входят: двенадцатипозиционный алфавитно-цифровой индикатор и комплект точечных индикаторов.
Система является модульной системой, дающей возможность расширения диапазона выполняемых функций на управление:
– автоматическое управление по эталонному резу
– дистанционное со штрека
Дистанционное радиоуправление комбайном производится при помощи системы радиоуправления.
Предупредительный сигнал по всей лаве будет осуществлять аппаратура АУЗМ, через которую посредством блок–контакта пускателя подключена аварийная остановка комбайна по всей длине лавы на переговорных устройствах.
Основой создания автоматизированных угледобывающих комплексов, работающих без постоянного присутствия людей в лаве, являются системы централизованного дистанционно-автоматического управления механизированными крепями. В проекте примем аппаратуру автоматизации механизированными крепями типа САУК-М, которая намного облегчает процесс передвижки секций крепи и лавного конвейера, за счет управления сразу несколькими секциями. Система САУК-М построена по принципу герметизированных электромагнитных реле.
2. Аппаратура автоматизации участкового транспорта.
Система автоматизации конвейерных линий с учетом современного уровня должна обладать функциональными возможностями, обеспечивающими:
1) Управление конвейерной линией с пульта управления, расположенного в зоне перегрузки с конвейерной линии в вагонетки;
2) Автоматический пуск конвейеров в линии в направлении против грузопотока с помощью пускового устройства;
3) Возможность как выбора, так и раздельного пуска любого маршрута разветвленной конвейерной линии;
4) Автоматическую подачу звукового предупредительного сигнала перед пуском конвейерной линии;
5) Возможность до запуска части конвейерной линии при остальных работающих конвейерах;
6) Автоматический контроль скорости движения ленты;
7) Включение на пуск каждого последующего конвейера только после достижения предыдущим конвейером заданной скорости;
8) Оперативное отключение всей конвейерной линии с пункта управления;
9) Экстренное прекращение пуска и экстренную остановку любого конвейера из любой точки по длине;
10) Аварийное автоматическое отключение конвейера при следующих нарушениях: отсутствии сигнала о достижении заданной скорости при пуске, снижении скорости во время работы несущего полотна до 75% номинальной, при неисправности привода конвейера, сходе ленты в сторону, завале мест перегрузки неисправностях цепей управления и контроля.
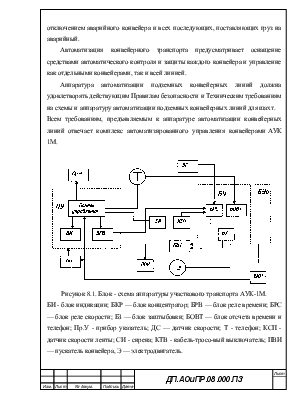
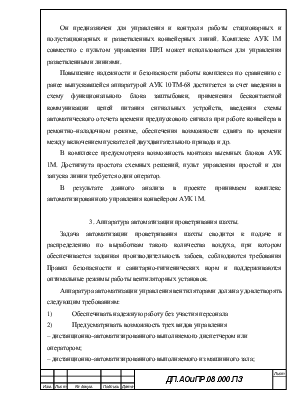
В основу этой аппаратуры положен принцип централизации управления, то есть принцип автоматического пуска конвейера в линии в последовательности обратной движению грузопотока, с контролем момента пуска каждого конвейера по скорости предыдущего и остановки конвейерной линии одновременным отключением аварийного конвейера и всех последующих, поставляющих груз на аварийный.
Автоматизация конвейерного транспорта предусматривает оснащение средствами автоматического контроля и защиты каждого конвейера и управление как отдельными конвейерами, так и всей линией.
Аппаратура автоматизации подземных конвейерных линий должна удовлетворять действующим Правилам безопасности и Техническим требованиям на схемы и аппаратуру автоматизации подземных конвейерных линий для шахт.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.