4.2. Моделювання тонкомпенсованного регулятора гучності
Необхідність введення тонкомпенсації в регулятор гучності з властивостями людського вуха. Чутливість якого на низьких та високих звукових частотах менше ніж на середніх частотах ( низькі частоти найгірше чути).
На рис.4.2.1 зображено схему для моделювання регулятора:
Компенсація на нижніх частотах відбувається за рахунок кола R2C3, та як при зменшені частоти опір конденсатора збільшується, що приводить до збільшення коефіцієнта передачі усього регулятора. Резистор R2 потрібен для обмеження зростання коефіцієнта передачі.
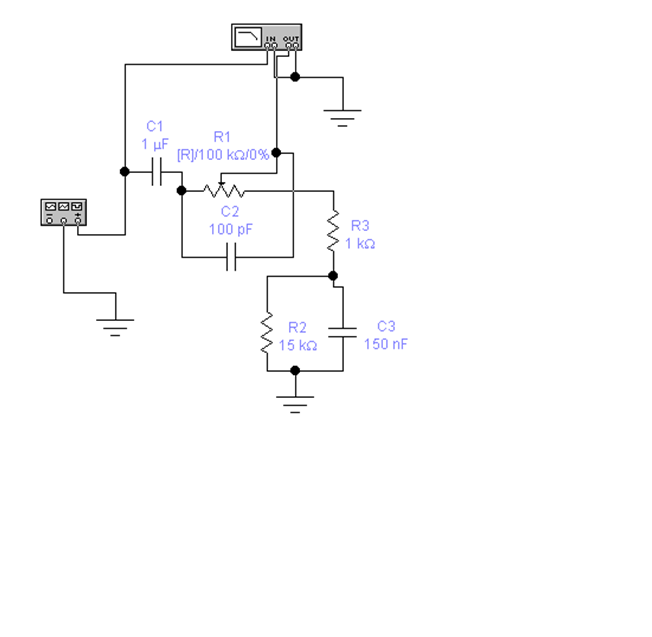 На верхніх частотах
компенсація відбувається за рахунок конденсатора С2, опір якого зменшується при
збільшені частоти.
На верхніх частотах
компенсація відбувається за рахунок конденсатора С2, опір якого зменшується при
збільшені частоти.

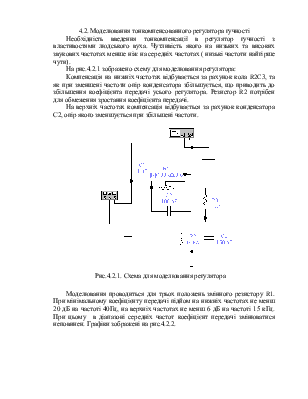
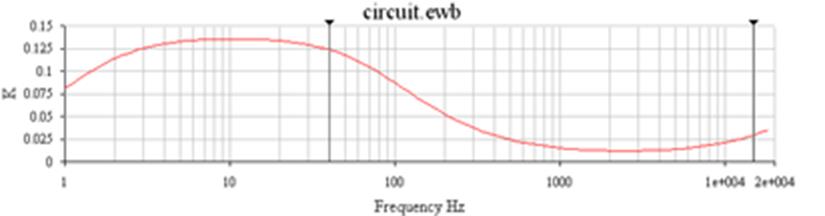
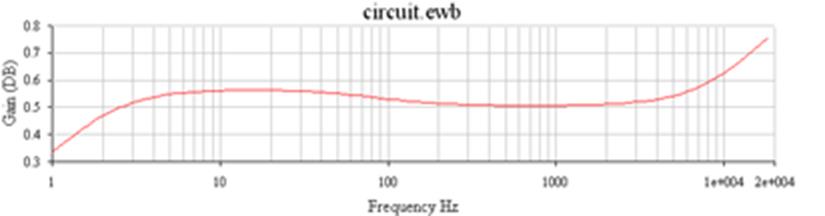
Моделювання проводиться для трьох положень змінного резистору R1. При мінімальному коефіцієнту передачі підйом на нижніх частотах не менш 20 дБ на частоті 40Гц, на верхніх частотах не менш 6 дБ на частоті 15 кГц. При цьому в діапазоні середніх частот коефіцієнт передачі змінюватися неповинен. Графіки зображені на рис.4.2.2.
|
|||
|
|||

|
||||
|
||||
|
||||
Як видно з рис.4.2.2.а при Кпер = 0.01 Кпер 40 Гц = 0.123, що складає 21.79 дБ, а Кпер 15 кГц = 0.0298, що складає 9.48 дБ, це все при умові що коефіцієнт передачі в діапазоні середніх частот змінюється на 40 дБ тому такі результати відповідають заданим умовам.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.