До регульованих параметрів (с1...сn) відносяться вихідні величини, що визначають режим роботи об’єкта і які необхідно підтримувати на заданому рівні або змінювати за визначеною програмою за допомогою регулюючого діяння.
Після складання параметричної схеми необхідно визначити канал регулювання, вибрати регульований параметр і регулююче діяння.
Регулююче діяння вибирають, виходячи з чутливості до цього об’єкта, а також з урахуванням бажаного збереження заданої продуктивності обладнання. Тому звичайно діють на енергоносій.
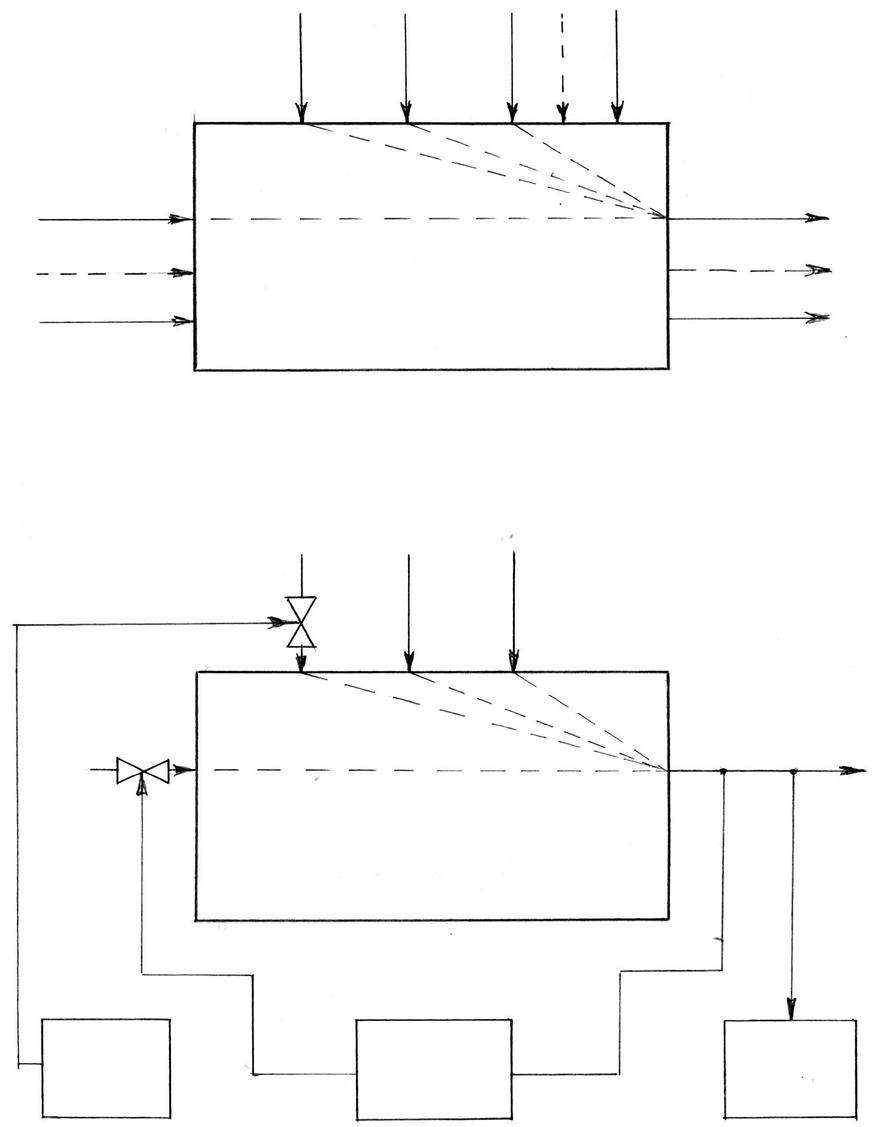
3.Структурна схема системи автоматизації.
Структурна схема - розвиток параметричної схеми. На ній спрощено показують канали контролю, регулювання і управління технологічними параметрами, зв’язок об’єкта автоматизації з щитом управління інженера-технолога. Ця схема-первинний документ, принципова основа для проектування системи автоматизації (рис. 2).
При розробці структурної схеми необхідно враховувати, що системи управління в цілому можуть бути дистанційними (ручними), блокуючими, програмними (всі), логічного управління і оптимізації, автоматизованими і автоматичними.
Контрольна робота стосується тільки перших трьох класів систем (дистанційного управління, автоблокування, програмного управління).
Розробка системи дистанційного управління (наприклад, клапаном, електродвигуном) пов’язана з вибором простого керуючого обладнання (ключ управління, кнопочна станція, панель дистанційного управління тощо), розміщених на щиті і пов’язаних з виконавчими механізмами або пусковим обладнанням (магнітний пускач, магнітний підсилювач тощо) безпосередньо або через перетворювач.
Система автоблокування призначена для запобігання ненормальному або аварійному ходу технологічних процесів на снові інформації, яка надходить від спеціального датчика або від АСК; ця система впливає на відповідний виконавчий механізм, електропривід насосу і т.п.
Автоблокування треба відрізняти від двопозиційного регулювання. Структурно і за реалізацією системи дистанційного управління і автоблокування можуть бути суміщені з АСК і АСР (наприклад, блокування на основі сигналізації).
Система програмного управління виконує періодичні (циклічні) включення, виключення в об’єкті, необхідні для проведення процесу (наприклад, управління мішалкою за заданою програмою, зміна завдання регулятора температури сушіння і т.п.). Така система може бути реалізована в найпростішому випадку на базі командоапарата, сполученого з одним або кількома виконавчими пристроями (частіше всього електродвигунами), або на базі програмного задатчика.
Складні сучасні системи управління реалізуються на базі мікропроцесорної техніки.
У найпростішому варіанті система автоматизації може складатися з об’єкта, датчика, вторинного приладу з регулюючою приставкою, виконавчого механізму і регулюючого органу. При цьому, як мінімум, має бути передбачений пристрій для ручного дистанційного управління регулюючим органом системи.
4. Вибір
засобів автоматизації.
Технічні засоби автоматизації треба вибирати, використовуючи рекомендовану літературу, реально існуючі системи на підприємствах і виходячи з наміченої завданням загальної структури системи.
При розробці системи особливу увагу слід приділити вибору шкали приладу та закону регулювання, а також можливості комплектування засобів.
Вибір апаратури з точки зору роду допоміжної енергії (електричної, пневматичної і гідравлічної) визначається пожежно- і вибухонебезпечністю об’єкта автоматизації, агресивністю навколишнього середовища, вимогами до швидкодії, дальності передачі сигналів інформації тощо. Так, для пожежно- і вибухонебезпечних умов у більшості випадків використовуються пневматичні засоби автоматизації; при високих вимогах до швидкодії і значних відстанях між джерелами і приймачами сигналів інформації-електричні системи. Гідравлічні системи через громіздкість і обмеженість радіуса дії використовують значно рідше.
При виборі апаратури важливо враховувати клас точності вимірювальної схеми, надійність роботи всієї системи, а також її вартість.
У контрольній роботі приводяться технічні характеристики вибраних засобів автоматизації (тип, градуїровка, шкала, границя зміни вхідних і вихідних сигналів, закон регулювання, живлення, хід виконавчого механізму, характеристика регулюючого органу тощо).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.