1.1.4. Принятые на судне от k-го ИСЗ навигационные сигналы (2.3) можно представить (в системном времени по шкале ЦУС) в виде
еk(t)=WАk(t-Dtk-rпк/сгр)sinwk(t-Dtk-rпк/сф), (1.7)
8
где W – функция ослабления, сГР- групповая и сФ- фазовая скорости распространения радиоволн.
Можно видеть, что полезная информация (о текущих координатах судна) содержится во временных положениях огибающей Аk(t-Dtk-rпк/сгр) и ВЧ заполнения несущей sinwk(t-Dtk-rпк/сф). Только результаты измерения этих параметров являются основными исходными данными для извлечения информации о количественных значениях указанных в предисловии навигационно-динамических параметров судна.
1.1.5. Заметим, что – поскольку текущая фаза ВЧ заполнения принятого сигнала равна Y(t)= wk(t-Dtk-rпк/сф) – то мгновенная частота w=dY(t)/dt=wk-(wk/cф)dr k/dt=2p[fk-(dr k/dt)/l] будет отличаться от номинала несущей на доплеровскую частоту, равную со знаком минус отношению радиальной скорости к длине волны: FД= - (drk/dt)/l. Количественные соотношения уместно здесь проиллюстрировать на примере идеализированной неподвижной модели Земного шара с радиусом аЗ @6371100 м и ИСЗ на круговой орбите c радиусом а (высотой Н=а-аЗ над Землей). При гравитационной постоянной Земли m=3.986008×1014м3/с2 и а=аЗ+H@26371100 км период обращения равен T=2p(a3/m)0.5@12 ч, а линейная скорость ИСЗ v=2pa/T на полусуточной орбите составит v=3887.8м/с, что при длине волны излучаемых колебаний l@0,1904м может вызвать в принимаемом колебании (на неподвижной точке орбиты вблизи ИСЗ) появление доплеровского сдвига несущей частоты на FO= ± v/l@20419Гц, где знак + соотвеьствует приближению ИСЗ, а знак -удалению ИСЗ. На поверхности Земли максимальная FД=F0аЗ/а » ±4,8 кГц будет возникать при совпадении точки приема с плоскостью орбиты в моменты, когда ИСЗ «восходит» или «заходит» , т.е. почти совпадает с горизонтом.
Вращение точек поверхности Земли вызовет свою долю изменения радиального расстояния между ИСЗ и точкой прием. Максимальная линейная скорость точки поверхности Земли имеет место на экваторе, где она равна отношению длины экватора (40000 км) на протяженность суток (86400с), т.е. около 462 м/с. Если бы плоскости экватора и орбиты совпадали, то на границе зоны радиовидимости наблюдалось бы доплеровское смещение около 2310Гц. Из-за того, что угол наклона орбиты примерно 60О, то максимальная составляющая обусловленного Землей сдвига несущей можно оценить, как , примерно, 1100Гц.
Сoвпадение неблагоприятных факторов случайно. Возможно по этой причине встречаются оценки максимального доплеровского смещения несущей на поверхности Земли около 4500 Гц.
Лишь на начальных этапах построения низкоорбитальных СРНС первого поколения предполагалось (/1/.с.270-273) производить измерения доплеровской частоты для выделения навигационной информации. Более рациональным оказалось использование приращений текущей фазы Yk(t) при помощи цифровых измерительных устройств.
1.2. Понятие о структуре измерителя параметров сигнала опорного
DАП= D(t-Dt) дальномерных кодов c погрешностью менее 0,5tЭ
Режимы измерения в АП начинают функционировать (/1/, п.13.5) после окончания режима поиска (т.е. грубого совмещения соответствующих элементов сигнального D(t) и опорного DАП= D(t-Dt) дальномерных кодов) c погрешностью менее 0,5tЭ. Оптимальная структура АП в режимах измерения представляется на рис.1.2..
Верхний канал (совпадающий с приведенным на рис.1.13 в /1/) образует отсчетную систему слежения за фазой несущей (ССН) сигнала (1.7) с выхода приемника
9
РПК. Из-за вносимой знаконеопределенными символами кода С(t) служебной информации необходимо использовать фазовые детекторы ФД (с постоянной времени интеграторов около 10 TD=10 мс) этой схемы поступает бинарно фазоманипулированная кодом DАП копия несущей, формируемая в ГУН из опорного колебания ОНК. Отличное от нуля усредненное (за время существенно болше tЭС=20TD=20мс) выходное напряжение перемножителя видеонапряжений с ФД управляет ГУН несущей. Суммарный результат управления пересчитывается в разность текущих фаз DY(t) между несущей сигнала и ОНК.
Служебное сообщение выделяется (после завершения переходных процессов в ССН) по видеонапряжениям с выхода одного из ФД.
Нижняя часть рис.1.2 образует отсчетную следящую систему за задержкой (ССЗ) огибающей A(t)ºD(t)C(t), появляющейся как видеонапряжение на выходе синхронного детектора СД. На первый вход СД поступает сигнал (1.7) с ВЧ-помехами, на второй вход - некодированное оопорное колебание с выхода ГУН
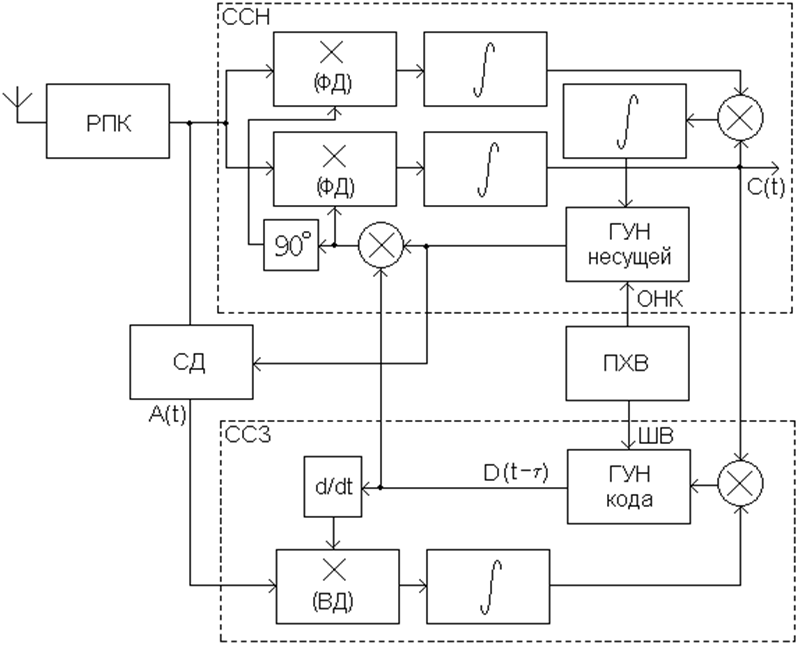
Рис.1.2. Структура АП в режиме измерений (ССН и ССЗ)
несущей. Для реализации оптимального алгоритма измерения (/1/, п.1.3) видеосигнал A(t) с видеопомехами должен перемножаться с производной копии огибающей дальномерного кода DАП= D(t-Dt). Поскольку эта производная имеет форму кратковременных почти прямоугольных “точечных” стробов (полярность которых совпадает со знаком производной вблизи точек смены полярностей D(t-Dt)), то операция перемножения с последующим усреднением может быть реализована временным дискриминатором ВД с интегратором, ненулевой выход которого управляет ГУН кода D(t-Dt) с передачей в вычислитель АП отсчета измеренной задержки tизм.ог принятого сигнала. В выпускае-
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.