


Государственная Морская Академия им. адм.
С.О.Макарова
Кафедра ТСС
Лабораторная работа: «Принцип действия корректируемого
гироскопа Вега-М»
Выполнил: Ли В.В. гр 511
Проверил преподаватель: Перфильев В.К.
Санкт-Петербург
2006
Назначение и комплектация гирокомпаса
Режим работы:
Основной режим- режим корректируемого гирокомпаса когда главная ось чувствительного элемента на ходу судна ориентирована вдоль полуденной линии N-S и следовательно располагается в плоскости истинного меридиана и в плоскости истинного горизонта.
Запасной режим- режим гироазимута, ось чувствительного элемента располагается в плоскости истинного горизонта и сохраняет то азимутальное направление, которое имело в момент перевоза прибора из режима гирокомпаса в режим гироазимута. В таком режиме прибор не обладает свойством избирательности и с течением времени точность его понижается.
Технические характеристики
«Вега-М»
Вес ГК 850г
Скорость вращения 15000 об/мин
Рабочая t корпуса гироблока +60 С
Рабочая t поддерживающей жидкости +75 С
Плотность поддерживающей жидкости 2.0 г/см³
Напряженность на гироблоке 40+2 В
Чувствительность датчиков угла 1В1, 1В2 2,5 дуговых минут
Быстродействие не менее 30˚/с
Жесткость горизонтальных торсионов 18·10ֿ³ Нм/рад
Жесткость вертикальных торсионов 10ֿ³ Нм/рад
Постоянная времени индикации горизонта 60с
ГК: Модуль управляющего момента Ay 6,8·10ֿ³ Нм/рад
Ay 0,3·10ֿ³ Нм/рад
Чувствительность в режиме ГК не хуже ±0,05˚
Быстродействие не менее 6˚\с
Погрешность коррекции скоростной девиации не более ± 0,3˚
ГА: Ay 0
Азимутальный дрейф (φ>70˚ неиспольз)
Время разгона ротора не >7 мин
Время выбега ротора не >15 мин
Ресурс гироблока 25000ч
Непрерывная работа 2000
Форсированный прогрев не >15 мин
Ускоренное приведение не >30 мин
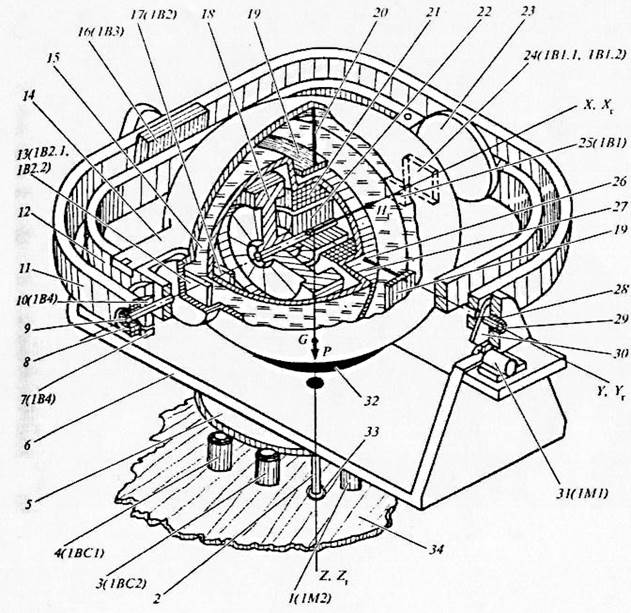
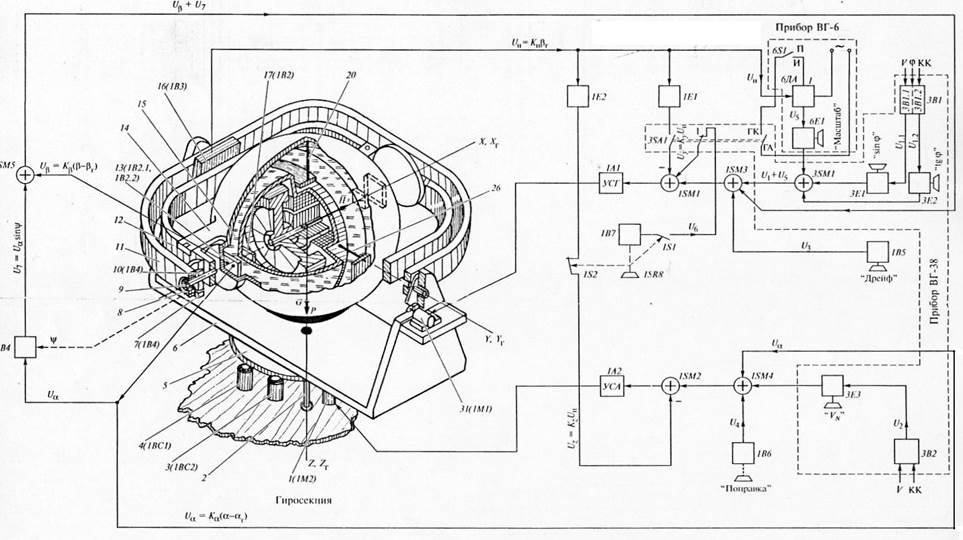
Принципиальная схема подвеса гиросферы и гироблока.
Ротор 18, выполненный в виде 2х симметрично расположенных маховиков, подвешен на подшипниках в герметичной камере 15. Гиросфера с помощью пары горизонтальных торсионов 26 подвешена в кардоновом кольце 19, которое с помощью пары вертикальных торсионов 20 подвешено в корпусе гироблока 14, т. о. ротор имеет 3 степени свободы относительно корпуса гироблока.
Пространство между гиросферой и корпусом гироблока заполняется поддерживающей жидкостью. Плотность её подобрана таким образом, чтобы при рабочей температуре гиросфера имела нулевую плавучесть. Центр масс гиросферы совпадает с ее геометрическим центром и следовательно имеет маятниковости.
Корпус 14 с подвешенной в ней гиросферой 15 образует гироблок. Корпус гироблока жестко закреплен в установочном кольце 12, которое является частью внешнего карданового подвеса, обеспечивающего корпусу гироблока 3 степени свободы.
К нижней части корпуса гироблока прикреплен массивный маятниковый груз
32, который смещает центр масс G гироблока относительно оси ОХ собственного вращения ротора гироскопа при наклонах корпуса прибора.
Внешний кардановый подвес устроен следующим образом
- установочное кольцо 12 подвешено на горизонтальных цанфах 9, соосных оси ОХ гироблока, подшипниках 8 горизонтально карданового подвеса 11
- горизонтальное кардановое кольцо 11 на горизонтальных цанфах 29, перпендикулярно цанфам установочного кольца, подвешенного в подшипниках 28 вертикального кольца 6. С горизонтальным кольцом 11 через редуктор 30 связан двигатель горизонтальной стабилизации 31, установленный на вертикальном кольце 6
- вертикальное кардановое кольцо 6, выполненное в виде вилки, установлено на вертикальной цанфе 2 в подшипниках 33 основания 34 гиросекции.
С вертикальным кольцом 6 через редуктор 5 связан двигатель азимутальной стабилизации 1, также размещенный на основании 34 гиросекции. С двигателем 1 механически связаны датчики курса 3 и 4
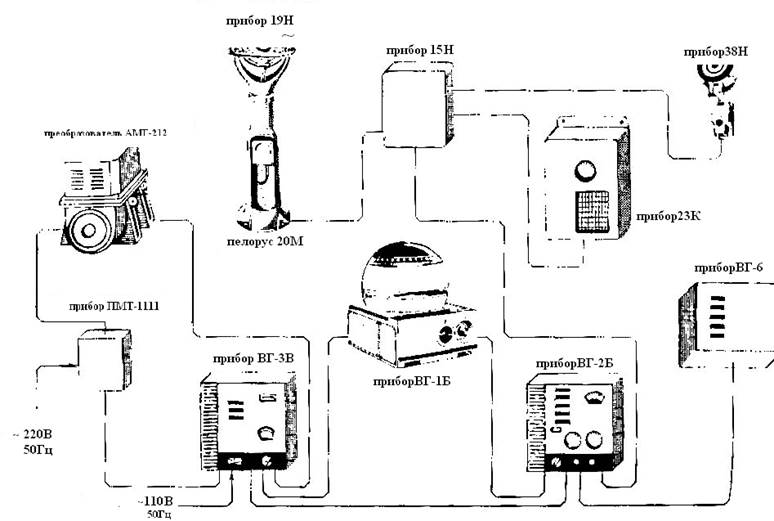
Комплектация ГК
Два варианта комплектации. Если в состав входит штурманский пульт ВТ-3В, то этот комплект приборов используется для навигационных целей в диапазоне широт от 0 до 80 N(S) в режиме ГК.
Если в состав входит штурманский пульт ВТ-3Б, то этот ГК используется в широтах 85-90 в режиме гироазимута.
ВГ-1Б Основной прибор
АМГ-212 Агрегат питания
АМГ-222
ПТМ- 1111 Магнитный пускатель
ВТ-2Б Прибор питания
ВТ-3Б Штурманский прибор (корректор-транслятор)
19Н-1 (19Н) Репиторы для пеленгования
38Н-1 (38Н) Информационный репитер
20М (21Г) Пелорус
15М Разветвительная коробка
ВГ-6 Сигнальный прибор
23К Курсограф
ПГК-2 Пеленгатор оптический
Системный состав гирокомпаса «Вега-М»
В основном приборе ВГ-1Б размещены несколько самостоятельных по назначению систем:
- гироскопический чувствительный элемент 1Б (гиросфера) и система его подвеса;
- трехстепенной стабилизированный элемент (корпус гироблока) и система его подвеса;
- система косвенного управления стабилизированным гироблоком, сообщаюшее ему свойство избирательности по отношению к меридиану и преобразующая его в чуствительный элемент ГК;
- система термостабилизации ГК;
- система ускоренного приведение гироблока в меридиан;
- блок выработки компенсационных сигналов для минимизации статического дрейфа ГК.
Режимы функционирования
1 Режим гиростабилизатора
ДДУ-УС-ДСZ
Cледящая сфера всегда согласована с положением гиросферы
2 Режим ГК с косвенным управлением (незатух. Колебания)
ИГ-УС-«ГК»-ДУY
С помощью горизонтальных торсионов создается момент Лy=Ay*В избирательность по отношению к меридиану и начало незатухающих колебаний
3 Режим ГК с косвенным управлением (затух. Колеб)
ИГ-УС-ДСZ
ЛZ=AZ*В эллипс незатухающих колебаний превращается в спираль широтная погрешность
4 Режим корректируемого ГК
Для компенсация широтной погрешности формирует корректирующий момент. Применяем ВУ1 и ВУ2
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.