|
Наименование прибора |
Шифр прибора |
Масса, кг |
Габариты, мм |
|
Центральный прибор |
ЦП |
9,0 |
240x260 |
|
Блок электронный |
БЭ |
13,5 |
350x300x200 |
|
Пульт оператора |
ПО |
4,0 |
265x200x152 |
|
Репитер пеленгаторный |
19-РШ |
8,0 |
286x210 |
|
Репитер аналоговый |
38-РШ |
6,5 |
260x212x203 |
|
Репитер цифровой |
38-РЦ |
3,5 |
265x200x155 |
|
Пелорус |
20-РШ |
17,0 |
400x1360 |
|
Блок питания |
БП-36.001 |
15,0 |
350x310x216 |
|
Распределительная коробка |
РК |
6,0 |
370x180x135 |
|
Транслятор курса |
ТК1 |
36 |
370x390x235 |
|
Транслятор курса |
ТК2 |
22 |
370x390x235 |
|
Транслятор курса |
ТКЗ |
22 |
370x390x235 |
|
Репитер пеленгаторный |
19Н |
9 |
126x272x352 |
|
Репитер путевой |
38Н |
8,7 |
210x182x445 |
|
Курсограф |
23К |
22 |
340x523x165 |
|
Пелорус |
20М |
33 |
450x1310 |
|
Оптический пеленгатор |
ПГК-2 |
4,2 |
130x315x225 |
Функциональная схема гирокомпаса
По принципу действия гирокомпасы серии "Гюйс" относят к классу одногироскопных корректируемых двухрежимных гирокомпасов с косвенным (электромагнитным) управлением.
Функциональная схема гирокомпаса представлена на рис. 2.49. Чувствительным элементом гирокомпаса "Гюйс" является жестко установленный на платформе 3 гироблок ГВК-6, построенный на динамически настраиваемом гироскопе (конструкция этого гироблока в принципе не отличается от конструкции гироблока ГБ-23/3, рассмотренного ранее).
В число основных составных частей гироблока входят: динамически настраиваемый гироскоп 2, его приводной двигатель 7, датчики угла 75 и 76, датчики момента 4 и 6. Приводной двигатель 7 через упругий подвес связан с ротором гироскопа.
Кроме гироблока на платформе 3 размещен один ("северный") акселерометр 9 (индикатор горизонта), чувствительная ось которого ориентирована параллельно продольной оси (т.е. оси Х—Х) гироблока. Указанный акселерометр вырабатывает сигнал, пропорциональный углу £ отклонения продольной оси платформы и, следовательно, гироблока, от плоскости горизонта. Пройдя электронный фильтр 7 с боль шой постоянной времени, сигнал акселерометра по параллельным линиям после усилителей 27 поступает на встроенные в гироблок датчики момента 4 и 6. Они обеспечивают приложение к ротору гироскопа моментов, которые управляют его движением (процессией) относительно горизонтальной и вертикальной осей гироблока.
Таким образом гироскопу приданы свойства избирательности по отношению к плоскости истинного меридиана и происходит демпфирование его колебаний.
Кроме того, сигнал с акселерометра 9 поступает в электронную схему блока 26, где происходит сравнение величины этого сигнала с величиной порогового (эталонного) напряжения. Если по какой-либо причине величина сигнала акселерометра превысит пороговое напряжение, то на время превышения гирокомпас автоматически переключается в режим гироазимута. Устройство 25 служит для ручного переключения режимов (его используют для технологических целей).
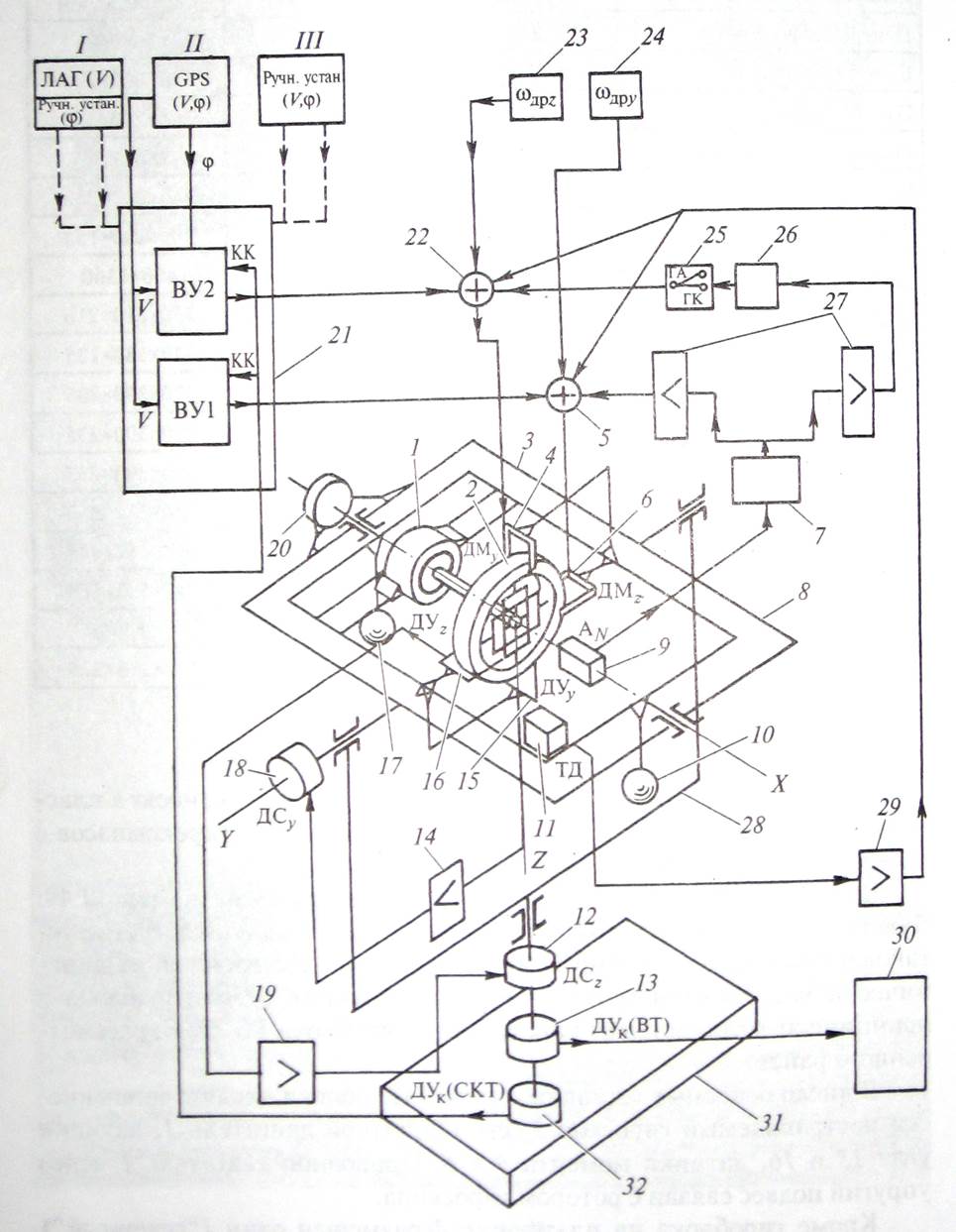
На датчики моментов 4, 6 поступает ряд других сигналов:
1. С вычислительного устройства 21 (блока ВУ1 и ВУ2) поступают сигналы корректирующих моментов. Эти сигналы формируются на основе информации о скорости объекта и широте его местонахождения. Реализованы три варианта введения информации, на выбор: скорость и широту вводят вручную; скорость вводят от лага, а широту вручную; скорость и широта поступают автоматически от GPS.
2. От потенциометров 23 и 24, регулируемых вручную, поступают сигналы моментов, компенсирующих наблюдаемый дрейф гироскопа, который является результатом воздействия на него вредных моментов.
3. От системы термокомпенсации, включающей в себя термодатчик 11, установленный на платформе рядом с Д НГ, и усилитель термокомпенсации 29, поступает сигнал, устраняющий дрейф гироскопа, который зависит от температуры окружающей ДНГ среды.
Платформа 3, на которой установлены гироблок и акселерометр, имеет трехстепенной подвес, реализованный следующим образом. По оси, совпадающей с продольной осью гироблока, платформа 3 подвешена на подшипниках в горизонтальном кардановом кольце 8. Это кольцо, также с помошью подшипников, подвешено по оси, совпадающей с поперечной осью гироблока, в вертикальном кардановом кольце 28. Кольцо 28, в свою очередь, по вертикальной оси подвешено на подшипниках в корпусе прибора 31. Платформа, вместе со всеми размещенными на ней элементами, обладает положительным маятниковым эффектом за счетмасс 10 и 17 (фактически масса одна). Таким образом, относительно продольной оси платформа имеет силовую маятниковую стабилизацию. Вдоль продольной горизонтальной оси платформы установлен демпфер 20, который обеспечивает быстрое погашение ее колебаний, являющихся результатом существования маятникового эффекта, относительно продольной оси.
С поперечной горизонтальной осью платформы связан двигатель горизонтной стабилизации 18, а с вертикальной осью карданова кольца — двигатель азимутальной стабилизации 12. Оба двигателя безредукторные. Двигатель азимутальной стабилизации разворачивает одновременно два вращающихся трансформатора 13 и 32, которые представляют собой первичные датчики курса. Один из них (СКТ) служит для передачи курса в вычислительные устройства 27, а второй (ВТ) — для передачи курса в транслятор курса 30.
Работа индикаторной системы стабилизации происходит следующим образом. Установленные в гироблоке датчики угла 15 и 16 вырабатывают сигналы рассогласования ротора динамически настраиваемого гироскопа с платформой, вокруг ее поперечной и вертикальной осей. Сигнал датчика угла 15 через усилитель 14 поступает на двигатель стабилизации 75, а сигнал датчика угла 16 через усилитель 19 поступает на двигатель 12. Отрабатывая эти сигналы, двигатели обеспечивают постоянное удержание платформы относительно поперечной и вертикальной осей гироскопа (режим индикаторного стабилизатора).
Следует отметить, что система индикаторной стабилизации за счет введения интегрального управления обладает астатизмом по отношению к постоянным возмущающим моментам.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.