6)Осуществление прогноза с помощью моделей и сравнение рассчитанных значений с экспериментальными:
Данный пункт является неотъемлемой частью исследования системы, так как после построения модели всегда следует провести проверку соответствия полученной модели и реального объекта. Проверка модели представляет собой процесс, который позволяет нам быть уверенными в том, что любой вывод о поведении системы, сделанный на основе моделирования, будет правильным.
Перед нами не стоит задачи доказать, что данная имитация является правильным отображением реальной системы. Вместо этого нас интересует справедливость выводов и решений, полученных на модели объекта.
В нашем случае мы должны провести на модели проверку с тем, чтобы выяснить ее соответствие реальному объекту.:
o Мы должны убедиться, что модель вырабатывает выходные сигналы, схожие с реальной моделью при одинаковых входных параметрах. Это соответствие желательно требовать и при предельных значениях параметров системы.
o Мы должны убедиться, что в модели выбранные параметры сигналов (математическое ожидание, дисперсия, корреляционная функция) совпадают с параметрами исходной модели. Для проверки таких гипотез следует использовать статистические методы.
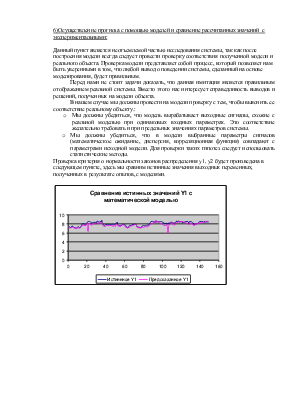
Проверка критерия о нормальности законов распределения y1, y2 будет произведена в следующем пункте, здесь мы сравним истинные значения выходных переменных, полученных в результате опытов, с моделями.
 |
7)Исследование свойств математической модели.
(Проверка критерия о нормальности законов распределения y1, y2)
Был поставлен опыт для проверки критерия согласия. Число точек N = 150 с интервалом дискретизации 1 секунда. Приложение 19.
Число квантов К = 1+3,2*lgN = 5.96
Берем К = 6.
Ширина интервалов: LY=(Ymax-Ymin)/K
LY1= 0.28
LY1= 0.47
Были построены гистограммы выборки по Y1 и Y2.
 |
 |
Проверку гипотезы о нормальности закона распределения y1 и y2 осуществляем с помощью критерия Пирсона.
|
Гистограмма Y1 |
||||
|
n |
Y1 |
f(Y1) |
Pm |
G |
|
15 |
7.12 |
0.36 |
0.06742 |
2.527347 |
|
14 |
7.4 |
0.34 |
0.134465 |
1.749663 |
|
33 |
7.68 |
0.796 |
0.22884 |
0.022261 |
|
29 |
7.96 |
0.7 |
0.255738 |
2.068951 |
|
48 |
8.24 |
1.158 |
0.187686 |
14.72218 |
|
9 |
8.52 |
0.217 |
0.125851 |
4.974696 |
|
8.8 |
1 |
26.0651 |
||
|
Гистограмма Y2 |
||||
|
n |
Y2 |
f(Y2) |
Pm |
G |
|
15 |
4.48 |
0.216 |
0.110384 |
0.109388 |
|
29 |
4.95 |
0.417 |
0.184436 |
0.10631 |
|
34 |
5.42 |
0.489 |
0.26313 |
0.627463 |
|
40 |
5.89 |
0.576 |
0.239036 |
0.604013 |
|
25 |
6.36 |
0.359 |
0.138259 |
1.006285 |
|
9 |
6.83 |
0.129 |
0.064755 |
0.03556 |
|
7.3 |
1 |
2.489019 |
||
Расчет gкр.
Gкр для 5 степеней свободы и уровня значимости 0,05 составляет 11,07.
Вывод: согласно критерию Пирсона,
так как g(y1) = 26,0651 > gкр = 11,07, то гипотеза о нормальности распределения величины y1 противоречит наблюдениям и должна быть отвергнута.
так как g(y2) = 2,489019 < gкр = 11,07, то гипотеза о нормальности распределения величины y2 принимается как не противоречащая наблюдениям.
Временная картина для Приложения 19:
· Исследование динамических свойств выходного параметра y3 (канал y3-u2).
Для идентификации динамических характеристик объектов управления используются специальные входные сигналы: ступенчатые, импульсные, синусоидальные. Ступенчатый сигнал является наиболее простым для применения, поэтому мы и использовали его в нашей работе. Здесь мы сняли кривую разгона и по ней графо-аналитическим методом определили параметры динамического звена (передаточную функцию звена). Однако этот метод используется в основном только в лабораторных исследованиях, так как на реальном объекте его применение ведет к увеличению себестоимости производства, а зачастую и к выходу за предельные границы допустимых ограничений, то есть к остановам производства и авариям.
Для снятия был взят период опроса (время дискретизации), равный 1 секунде, выбор сделан из условия непрерывности процесса.
Полученная разгонная характеристика: (Приложение 21)
Аналитический вид
передаточной функции: 
Установившиеся значения:
U2 = 4.64
Y3 = 5.12 , следовательно
коэффициент передачи K0 = 1.1
Графоаналитическим методом определяем:
время запаздывания t0 = 21 c
постоянная времени T0= 12 c
Полученная передаточная
функция ТОУ: 
Временная картина для Приложения 21
 :
:
· Оптимизация выбранного критерия оптимальности ТОУ
Постановка задачи оптимизации:
План задачи: X1, X2, U1, U2
Критерий оптимизации: Y1(X1, X2, U1, U2) ® max
Y1 = 0.33745*X1 – 0.12717*X2 + 0.56295*U1 + 0.54609*U2 + 3.2222
Ограничения на управляемые переменные:
1 £X1 £ 3
1 £X2 £ 4.5
1.5 £U1 £ 4
2 £U2 £ 4
Функциональные ограничения находим методом линейного программирования:
a) Y2 = 0.37769*X1 + 0.39776*X2 + 0.44069*U1 + 0.41796*U2 + 0.41764 ® max
при
X1 £ 3
X2 £ 4.5
U1 £ 4
U2 £ 4
Решение: X1 = 3, X2 = 4.5, U1 = 4, U2 = 4
Y2max = 6.775
б) Y2 = 0.37769*X1 + 0.39776*X2 + 0.44069*U1 + 0.41796*U2 + 0.41764 ® min
при
1 £X1
1 £X2
1.5 £U1
2 £U2
Решение: X1 = 1, X2 = 1, U1 = 1.5, U2 = 2
Y2min = 2.69
Постановка стохастической задачи оптимизации
Т.к. превышения пороговых значений Y2 приводит к существенным потерям, то по технологическим соображениям задачу стохастической оптимизации формулируем в виде задачи оптимизации по вероятности (Р - модель):
Y1(X1, X2, U1, U2) ®max
Ограничения на управляемые переменные:
1 £X1 £ 3
1 £X2 £ 4.5
1.5 £U1 £ 4
2 £U2 £ 4
Функциональные ограничения:
P { Y2(X1, X2, U1, U2) £ Y2max } ³ p
P { Y2(X1, X2, U1, U2) ³ Y2min } ³ p
p = 0.9 – доверительная вероятность
Оптимизация по регрессионным моделям
1. Искусственное сведение стохастической задачи к детерминированной
Y1 = 0.33745*X1 – 0.12717*X2 + 0.56295*U1 + 0.54609*U2 + 3.2222 ®max
Ограничения на управляемые переменные:
1 £X1 £ 3
1 £X2 £ 4.5
1.5 £U1 £ 4
2 £U2 £ 4
Функциональные ограничения:
Y2(X1, X2, U1, U2) £ Y2max – g(p)*s2
Y2(X1, X2, U1, U2)³ Y2min + g(p)*s2
p = 0.9 – доверительная вероятность
g(p) – квантиль нормированного нормального распределения
Решение: X1 = 2.871, X2 = 1, U1 = 4, U2 = 4
Y1(X1, X2, U1, U2) = 8.5
2. Исследование чувствительности оптимального решения к ошибкам
Пусть коэффициенты
регрессионной модели меняются в некоторых ограниченных пределах  :
:
тогда для определения
пределов изменения критерия оптимизации необходимо решить две задачи: с
«широкой» допустимой областью (коэфф-ты ограничений равны ![]() ) и критерием с коэффициентами
) и критерием с коэффициентами  , и с «узкой» допустимой областью (
, и с «узкой» допустимой областью (![]() ) и критерием с коэффициентами
) и критерием с коэффициентами 
а) Y1 = 0.233*X1 – 0.214*X2 + 0.441*U1 + 0.432*U2 + 2.255 ®max
Ограничения на управляемые переменные:
1 £X1 £ 3
1 £X2 £ 4.5
1.5 £U1 £ 4
2 £U2 £ 4
Функциональные ограничения:
Y2(X1, X2, U1, U2) £ Y2max – g(p)*s2
Y2(X1, X2, U1, U2)³ Y2min + g(p)*s2
Y2 = 0.488*X1 + 0.49*X2 + 0.57*U1 + 0.539*U2 + 1.122
p = 0.9 – доверительная вероятность
g(p) – квантиль нормированного нормального распределения
Решение: X1 = 1, X2 = 1, U1 = 1.89, U2 = 4
Y1(X1, X2, U1, U2) = 5.138
б) Y1 = 0.442*X1 – 0.04*X2 + 0.685*U1 + 0.661*U2 + 3.886 ® max
Ограничения на управляемые переменные:
1 £X1 £ 3
1 £X2 £ 4.5
1.5 £U1 £ 4
2 £U2 £ 4
Функциональные ограничения:
Y2(X1, X2, U1, U2) £ Y2max – g(p)*s2
Y2(X1, X2, U1, U2)³ Y2min + g(p)*s2
Y2 = 0.267*X1 + 0.306*X2 + 0.312*U1 + 0.296*U2 - 0.287
p = 0.9 – доверительная вероятность
g(p) – квантиль нормированного нормального распределения
Решение: X1 = 3, X2 = 3.869, U1 = 4, U2 = 4
Y1(X1, X2, U1, U2) = 10.435
3. Испытание статистических гипотез в задаче стохастической оптимизации
План задачи: 
Критерий оптимизации:
|

Ограничения на управляемые переменные:
1 £X1 £ 3
1 £X2 £ 4.5
1.5 £U1 £ 4
2 £U2 £ 4
Функциональные ограничения:
 £Y2max
£Y2max
³Y2min
![]()
![]() -- дисперсия Y1 и Y2
соответственно
-- дисперсия Y1 и Y2
соответственно
V1, V2 – ковариационная матрица коэффициентов
Решение: X1 =2.783, X2 = 1, U1 = 4, U2 = 4
Y1(X1, X2, U1, U2) = 9.55
· Исследование и выбор оптимального закона регулирования регулятора
Период опроса выбирается аналогично предыдущему пункту( интервал дискретизации равен 1 секунде из условия непрерывности процесса), интервал квантования по уровню задается равным 1%.
1. Выбор внешних показателей качества процесса.
Были выбраны :
§ Для П-регулятора переходный процесс (ПП) с 20% перерегулированием и с минимальным временем ПП
§ Для ПИ-регулятора ПП с 20% перерегулированием и без перерегулирования
§ Для ПИД-регулятора с 20% перерегулированием и без перерегулирования
2. Нахождение оптимальных параметров настроек регуляторов различными законами для регулирования переходного процесса с выбранными свойствами.
§
П-регулятор:
с 20% перерегулированием – Кр = 0.41
с минимальным временем – Кр = 0.78
§
ПИ-регулятор:
с 20% перерегулированием – Кр = 0.45, Ти = 10.27
без перерегулирования – Кр = 0.246, Ти = 10.73
§
ПИД-регулятор
с 20% перерегулированием – Кр = 0.5, Ти = 16.8 , Тд
= 5.44
без перерегулирования – Кр = 0.36, Ти = 16.6, Тд
= 4.2
с минимальным временем – Кр = 1,51 Ти = 19,2, Тд = 7,9
3. Полученные по итогам эксперимента результаты.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.