Лабораторная работа
Система прямого цифрового управления на базе УЦВМ
Целью работы является изучение особенностей работы УЦВМ в замкнутом контуре управления и программной реализации простейших законов регулирования.
1. Теоретическое описание работы
Структура и функциональная схема СПЦУ
Применение УЦВМ в системах автоматического управления объектами является перспективным направлением комплексной автоматизации производства.
Широкое внедрение УЦВМ в управлении промышленными объектами обуславливается рядом ценных свойств таких систем:
- возможностью обслуживания многих объектов управления одной УЦВМ в режиме разделения времени;
- возможностью реализации сложных законов регулирования, повышающих качество САР и практически нереализуемых средствами техники аналогового регулирования (оптимальных, с переменной и иерархической структурой, с упреждением, с элементами адаптации и др.);
- возможностью управления большими промышленными комплексами по косвенным параметрам и технико-экономическим показателям (ТЭП) (например, себестоимости или прибыли), которые являются интегральными характеристиками системы в целом и требуют обработки большого объема данных;
- возможностью типизации и унификации решения задач контроля и управления в АСУТП.
Системы управления на базе УЦВМ в настоящее время внедряются не только на новых производствах, но и вытесняют устаревшие локальные системы регулирования. Если еще совсем недавно считалась экономически выгодной замена 50 локальных регуляторов одной УЦВМ, то в настоящее время эта цифра уже существенно снизилась, так как УЦВМ, работающая в режиме разделения времени, может решать и ряд вспомогательных задач, непосредственно не связанных с управлением.
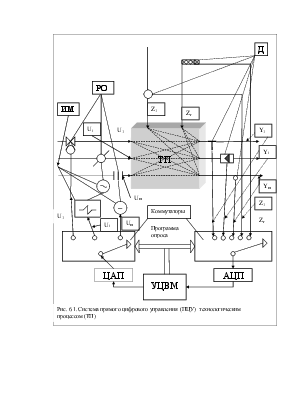
Системы прямого цифрового управления (ПЦУ – рис 6.1), т. е. системы, в которых информация с датчиков на объекте управления поступает непосредственно на УЦВМ, а сигналы управления с нее подаются непосредственно на исполнительные механизмы и регулирующие органы (заслонки, клапаны и т. д.) объекта управления, являются важнейшей частью АСУ, занимая в иерархии последних первый (нижний) уровень. Совместно с устройствами связи с верхними уровнями АСУ и устройствами связи с операторами (терминалами, дисплеями и т. д.) система ПЦУ образует АСУ ТП.
 |
Важнейшим элементом входного устройства УЦВМ является преобразователь непрерывной аналоговой величины в цифровой код (АЦП). Любой преобразователь, независимо от его принципа действия и конструктивного оформления , осуществляет три основные операции: квантование по уровню (по амплитуде), квантование по времени и кодирование. Выходные величины АЦП – цифровой двоичный код – необходимо формировать так, чтобы число разрядов кода было не меньше количества разрядов УЦВМ.
Основным элементом выходного устройства УЦВМ является преобразователь цифрового кода в непрерывную аналоговую величину (ЦАП).
Системы регулирования с УЦВМ относятся к классу цифровых, поскольку включают в себя указанные два вида квантования. Следует иметь ввиду, что квантование по времени делает систему автоматического регулирования импульсной, а квантование по уровню – еще и нелинейной. Однако в большинстве случаев при синтезе САУ на основе УЦВМ эффектами квантования по уровню можно пренебречь, если число уровней квантования, определяемое числом разрядов, АЦП достаточно велико (7-8). Квантование по времени обычно приводит к ухудшению качества регулирования по сравнению с непрерывными системами, однако выбором параметров закона регулирования (периода опроса и коэффициентов закона регулирования) это ухудшение всегда можно свести к допустимой величине. Системы ПЦУ обычно рассматриваются как импульсные системы с амплитудно-импульсной модуляцией (АИМ).
Одноконтурная система прямого цифрового управления с АИМ может быть представлена следующей эквивалентной схемой (рис. 6.2) [1], на которой нашли отражение:
- процессы опроса регулируемой переменной Y(t) и выдачи (в цифровой форме) результата вычислений в дискретные моменты времени (они реализуются соответственно импульсными элементами ИЭ1 и ИЭ2);
- процесс вычисления в УЦВМ управляющего воздействия, учитываемый в виде задержки на время момента выдачи результата вычислений;
- процессы аналого-цифрового и цифроаналогового преобразований, осуществляемые соответственно в АЦП и ЦАП;
- процесс запоминания с помощью фиксатора нулевого порядка дискретного во времени управляющего воздействия.
Отметим, что имеющиеся в реальной схеме системы ПЦУ процессы квантования сигналов во времени в точках a (вызов параметра уставки Y0* из ОЗУ УЦВМ) и б (опрос через коммутатор регулируемой переменной y(t) в дискретные моменты времени) на приведенной эквивалентной схеме отнесены для простоты к одному импульсному элементу ИЭ1.
В указанной схеме существенно, что время вычислений τвыч всегда ограничено некоторой величиной τдоп ,что является условием работы УЦВМ в реальном масштабе времени.
Предполагается, что
τвыч ≤ τдоп (1)
τдоп ≤ Тmin (2)
где Тmin - минимальное время опроса, определяемое быстродействием АЦП.
Состав и структура системы ПЦУ
Вычислительный комплекс учебной лаборатории АСУ ТП МЭИ (рис. 6.3) включает в себя:
1.Управляющую вычислительную машину с устройством ввода-вывода (алфавитно-цифровое печатающее устройство, перфоратор и фотосчитывающее устройство).
2. Имитатор технологического процесса непрерывного типа.
3. Типовой пульт оператора, оснащенный серийными средствами контроля, регистрации данных и сигнализации, органами управления, мнемосхемой и средствами локальной автоматики.
4. Устройство восьмиканального аналого-цифрового и цифроаналогового преобразователя типа УП-1.
В данной лабораторной работе УЦВМ используется для реализации алгоритма одноконтурного прямого цифрового управления класса ПИД.
Структурная схема одноконтурной системы ПЦУ, реализованной на основе вычислительного комплекса лаборатории АСУ ТП МЭИ, приведена на рис. 6.4.
Объектом управления является технологический процесс непрерывного типа (см. описание лабораторной работы № 1). В режиме ПЦУ решается задача стабилизации промежуточного выхода у3 (выходная регулируемая величина), управление осуществляется за счет изменения управляемой переменной U2 . К входу объекта приложено, помимо управляющего, также случайное возмущающее воздействие е(t), задаваемое генератором псевдослучайных двоичных сигналов.
На схеме рис. 6.4. звездочкой обозначены параметры, представленные в цифровой форме; например, элемент сравнения действительного значения выхода у3 с уставкой у30 для получения рассогласования реализован в цифровом виде на УЦВМ.
Управление импульсными элементами ИЭ1 и ИЭ2, определяющее в данном случае период опроса, осуществляется таймером (счетчиком реального времени), входящим в комплект УЦВМ.
Реализация дискретных ПИД-алгоритмов прямого цифрового управления.
В дискретной форме ПИД-алгоритм, являющийся одним из наиболее универсальных алгоритмов управления с заданным качеством, может быть представлен в форме (2)

или (3)
![]()
при ![]()
где
un – величина управляющего воздействия в текущий n-й дискретный момент времени;
εn – величина рассогласования уставки и регулируемой переменной в соответствующий момент времени;
kп, kи, kд - коэффициенты усиления соответственно пропорциональной, интегральной и дифференциальных составляющих алгоритма.
Связь дискретной формы (3) ПИД-алгоритма с непрерывной (4)
 (4)
(4)
и коэффициентами следующая
![]()

 (5)
(5)
где T, Tи, Tд - соответственно постоянные времени квантования, интегрирования и дифференцирования.
Кроме того, при реализации алгоритмов управления на УЦВМ существенным моментом является программа перевода чисел с фиксированной запятой, поступающих от АЦП на приемный регистр (сумматор) УЦВМ, в форму с плавающей запятой, которая используется в ПИД-алгоритме для увеличения точности.
Выбор параметров Т, kп, kи, kд осуществляется в соответствии с рекомендациями лабораторной работы № 5. При этом следует учесть, что эффектом квантования по времени можно пренебречь при выполнении условия
![]() Т ≤ 0,2∙ τ0 ,
Т ≤ 0,2∙ τ0 ,
а для объектов без запаздывания (6)
Т ≤ 0,1∙ Тс
Где Тс – период собственных колебаний в системе с аналоговым регулятором.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.