Лабораторная работа по курсу МСУ №2
Тема: «Моделирование и исследование характеристик звеньев системы автоматического регулирования частоты активной мощности гидроагрегата»
Выполнили |
|
Студенты |
Лепёшкин С. Н. Медведева А.Н. |
|
Группа |
А-2-02 |
|
Бригада № |
5 |
|
Дата |
Принял |
|
Преподаватель |
Митрофанов В. Е. |
Дата |
Параметры исследуемой системы:
![]() с
с ![]() с
с
1. Реализация (на базе ПОЯ CSSE) модели неминимально-фазового звена первого порядка с передаточной функцией вида
![]()
x
![]()
![]()
![]()
![]() -
y
-
y
![]()
![]()
-
Реализация данной модели на ПОЯ CSSE при k=1,5
INITIAL
om=2;
q=0
DYNAMIC
q'=1.5*x-y;
y=11.1111*q-2*1.5*x;
x=SIN(RAMP(0)*om)
2. Построение АЧХ, ФЧХ и АФХ исследуемого звена методом последовательного эксперимента, с использованием полученной модели звена.
|
|
|
A |
|
2 |
0,54 |
1,63 |
|
5 |
1,11 |
1,7 |
|
15 |
2,085 |
2,55 |
|
20 |
2,32 |
2,75 |
|
30 |
2,59 |
2,9 |
|
50 |
2,71 |
2,96 |
|
100 |
3 |
3 |
3. Построение модели замкнутой системы, передаточная функция которой в разомкнутом состоянии имеет вид
 x
x
- ![]()
![]()
-
![]()
![]()
![]()
![]() y
y
![]()
![]()
![]()
- -
![]()
Реализация данной модели на ПОЯ CSSE
INITIAL
Kp=28;
T1=0.09;
T2=2.5;
g=0;
q=0
DYNAMIC
q'=Kp*(x-y)-y;
g'=-T1*Kp*(x-y)-(0.5*T1+T2)*y+q;
y=(2/(T1*T2))*g;
x=STEP(0)
4.
Исследование устойчивости
САР, при изменении коэффициента усиления разомкнутой системы ![]() . Определение
предельного коэффициента усиления САР, обеспечивающего её устойчивость.
. Определение
предельного коэффициента усиления САР, обеспечивающего её устойчивость.
Переходный
процесс системы при ![]() =14,3=
=14,3=![]()
Переходный
процесс системы при ![]() =13 <
=13 <![]()
Переходный
процесс системы при ![]() =15 >
=15 >![]()
5.
Построение зависимости
величины ![]() от параметра
от параметра ![]() .
.
![]() =14,3
=14,3
|
T1 |
0,36 |
0,18 |
0,09 |
|
T2 |
2,5 |
2,5 |
2,5 |
|
k |
7,4 |
14,3 |
28,3 |
|
|
6,94 |
13,88 |
27,77 |
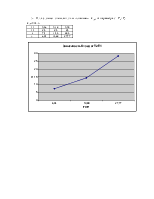
6.
Определение значения ![]() для
заданных постоянных времени (аналитический способ)
для
заданных постоянных времени (аналитический способ)
14.389 – предельный коэффициент усиления
8,17 – частота на которой годограф пересекает точку (-1; j0)
7. Реализация и тестирование программной модели нелинейного статического звена с характеристикой в виде многоступенчатого несимметричного гистерезиса.
 Количество ступеней N=5
y
Количество ступеней N=5
y
Дискреты функции переключения:
-dx=1,0
-dy=1,0
dy
dx x
Реализация данной модели на ПОЯ CSSE
INITIAL
om=10;
F1=0;
F2=0;
F3=0;
F4=0;
F5=0;
q=0
DYNAMIC
x=5.5*SIN(RAMP(0)*om);
F1=DH(-1000,-999,-1,0,1,1,x);
F2=DH(-1000,-999,-1,1,1,2,x);
F3=DH(-1000,-999,-1,2,1,3,x);
F4=DH(-1000,-999,-1,3,1,4,x);
F5=DH(-1000,-999,-1,4,1,5,x);
y=F1+F2+F3+F4+F5;
q'=x
Переходный процесс системы при подаче на вход синусоидального сигнала
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.