








"КМСУО Су-90"
Математическая модель.
Рабочий протокол на условия программирования
модели РП - РГС
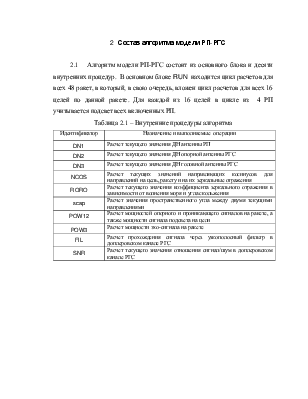
2.1 Алгоритм модели РП-РГС состоит из основного блока и десяти внутренних процедур. В основном блоке RUN находится цикл расчетов для всех 48 ракет, в который, в свою очередь, вложен цикл расчетов для всех 16 целей по данной ракете. Для каждой из 16 целей в цикле из 4 РП учитывается подсвет всех включенных РП.
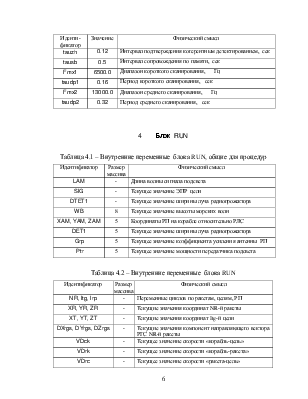
Таблица 2.1 – Внутренние процедуры алгоритма
|
Идентификатор |
Назначение и выполняемые операции |
|
DN1 |
Расчет текущего значения ДН антенны РП |
|
DN2 |
Расчет текущего значения ДН опорной антенны РГС |
|
DN3 |
Расчет текущего значения ДН головной антенны РГС |
|
NCOS |
Расчет текущих значений направляющих косинусов для направлений на цель, ракету и на их зеркальные отражения |
|
RORO |
Расчет текущего значения коэффициента зеркального отражения в зависимости от волнения моря и угла скольжения |
|
scap |
Расчет значения пространственного угла между двумя текущими направлениями |
|
POW12 |
Расчет мощностей опорного и проникающего сигналов на ракете, а также мощности сигнала подсвета на цели |
|
POW3 |
Расчет мощности эхо-сигнала на ракете |
|
FIL |
Расчет прохождения сигнала через узкополосный фильтр в доплеровском канале РГС |
|
SNR |
Расчет текущего значения отношения сигнал/шум в доплеровском канале РГС |
3 Входная, выходная информация и константы
алгоритма модели РП-РГС
Таблица 3.1 - Входные величины алгоритма
|
Обозначение |
Идентификатор [размерность] |
Наименование параметра |
Откуда поступает |
|
Dt |
Del_t |
Период вызова алгоритма |
Диспетчер |
|
Xц(Nц), Yц(Nц), Zц(Nц) |
Xc_i[17], Yc_i[17], Zc_i[17] |
Истинные декартовы координаты Nц–й цели в земной СК, м |
Модель движения целей |
|
ЭПР(Nц) |
EPR[17] |
ЭПР Nц–й цели |
Блок ввода данных экспери-мента |
|
Тип(Nц) |
TIPc[17] |
Тип Nц–й цели |
|
|
Aim(Nц) |
Aim[17] |
Признак имитации Nц–й цели |
|
|
Ball |
Ball |
Волнение моря |
|
|
кс |
Ksh |
Курс корабля в земной СК, град. |
Модель движения корабля |
|
Xс , Yс , Zс , |
Xsh, Ysh, Zsh, |
Координаты корабля в земной СК, м. |
|
|
Прп(р) |
Ppr[5] |
Истинный (отработанный) курсовой угол Р-го радиопрожектора в земной СК |
Модель устройств наведения СП |
|
УМрп(р) |
UMpr[5] |
Истинный (отработанный) угол места Р-го радиопрожектора в земной корабельной СК |
|
|
цо(р) |
CO[5] |
Команда "Цель облучать" р-му радиопрожектору |
Модель КП |
|
шд(р) |
ShD[5] |
Команда "Широкая диаграмма направленности" р-му радиопрожектору |
|
|
Xp(Np), Yp(Np), Zp(Np) |
Xmis[49], Ymis[49], Zmis[49] |
Декартовы координаты Np –й ракеты в земной корабельной СК, м |
Модель движения ЗУР |
|
yр (Np) |
Psi_mis[49] |
Угол рысканья Np –й ракеты в земной СК, град |
Модель движения ЗУР |
|
qр (Np) |
Nju_mis[49] |
Угол тангажа Np –й ракеты в земной СК, град |
|
D* (Np) |
VDo [49] |
Оценка скорости ракета - цель, м/с |
|
|
VОТНкц(Nц) |
Votn_kc[17] |
Скорость «корабль – Nц-я цель» в земной корабельной СК, м/с |
Модель кинематики |
|
Vотнкр(Np) |
Votn_kr[49] |
Скорость «корабль - Np-я ракета» в земной корабельной СК, м/с |
Модель кинематики |
|
Vотнрц(Nр, Nц) |
Votn_rc[49,17] |
Скорость «Np-я ракета - цель» в земной корабельной СК, м/с |
Модель кинематики |
|
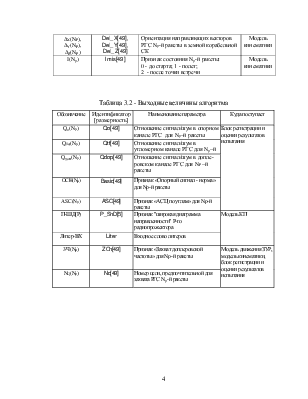
Dx(Np), Dy(Np), Dz(Np) |
Del_X[49], Del_Y[49], Del_Z[49] |
Ориентация направляющих векторов РГС Np-й ракеты в земной корабельной СК |
Модель кинематики |
|
I(Np) |
Imis[49] |
Признак состояния Np-й ракеты: 0 - до старта; 1 - полет; 2 - после точки встречи |
Модель кинематики |
Таблица 3.2 - Выходные величины алгоритма
|
Обозначение |
Идентификатор [размерность] |
Наименование параметра |
Куда поступает |
|
Qo(Nр) |
Qo[49] |
Отношение сигнал/шум в опорном канале РГС для Np–й ракеты |
Блок регистрации и оценки результатов испытания |
|
Qqj(Nр) |
Qtf[49] |
Отношение сигнал/шум в угломерном канале РГС для Np–й ракеты |
|
|
Qдоп(Nр) |
Qdop[49] |
Отношение сигнал/шум в допле-ровском канале РГС для Np –й ракеты |
|
|
OCH(NP) |
Basic[49] |
Признак «Опорный сигнал - норма» для Np-й ракеты |
|
|
ASC(Np) |
ASC[49] |
Признак «АСЦ по углам» для Np-й ракеты |
|
|
П-ШД(Р) |
P_ShD[5] |
Признак "широкая диаграмма направленности" Р-го радиопрожектора |
Модель КП |
|
Литер-ВХ |
Liter |
Входное слово литеров |
|
|
3Ч (NP) |
ZCh[49] |
Признак «Захват доплеровской частоты» для Np-й ракеты |
Модель движения ЗУР, модель кинематики, блок регистрации и оценки результатов испытания |
|
NЦ (Np) |
Nc[49] |
Номер цели, предпочтительной для захвата РГС Np -й ракеты |
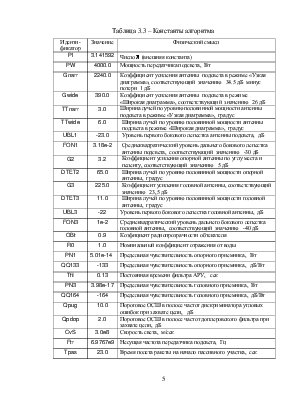
Таблица 3.3 – Константы алгоритма
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.