а б в
Сила Y вызывает S-образный изгиб всех балочек (рис. 3.5, в). Так как перемещения всех балочек при этом одинаковы, а толщина средней больше толщины крайних, то и напряжения от силы Y будут больше в средней балочке. По величине напряжения максимальны и противоположны по знаку в местах заделки балочек и равны нулю посередине балочек.
Сила Х порождает во всех балочках незначительные напряжения сжатия (или растяжения при Х < 0), однако если балочка будет иметь относительно большой изгиб от силы Y или момента Mz, то сила Х увеличит (или уменьшит при Х < 0) этот изгиб и чистое разделение компонентов будет невозможно. Отсюда следует вывод, что для хорошего разделения компонентов необходимо по возможности уменьшать перемещения упругих элементов.
После проведенного анализа можно выделить на упругих элементах участки, на которых напряжения зависят преимущественно только от какого-то одного компонента – Mz( посередине крайних балочек) или Y (вблизи заделки средней). По аналогии для второго параллелограмма весов можно выделить на средней балочке участки, на которых напряжения зависят только от компонента Х. Наклеив на этих участках тензодатчики и соединив их в мосты (см. рис. 3.4), мы будем иметь возможность получать сигналы, пропорциональные каждому из трех компонентов. Знаками плюс и минус отмечен характер изменения сопротивления датчиков при показанном направлении действия сил.
Питание измерительных мостов осуществляется высокостабилизированным источником постоянного тока типа Б5-43 с нестабильностью выходного напряжения не более 0,02 от номинального. Выходные сигналы измеряют и регистрируют с помощью автоматического потенциометра типа КСП-4, имеющего погрешность измерений не более ±0,5 % от нормирующего значения измеряемой величины.
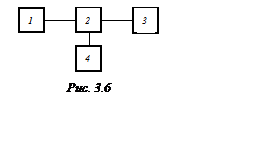 Схема измерений представлена на рис. 3.6. На нем
обозначено: 1 –тензовесы, 2 – блок управления, 3 –
источник питания, 4 – потенциометр.
Схема измерений представлена на рис. 3.6. На нем
обозначено: 1 –тензовесы, 2 – блок управления, 3 –
источник питания, 4 – потенциометр.
Блок управления служит:
• для включения питания мостов (тумблер «Питание»);
• изменения полярности питания при перемене направления сил, действующих на модель (тумблеры «Полярность питания»);
• установки чувствительности по каждому каналу (регуляторы «Установка чувствительности»);
• установки нулевых показаний потенциометра по каждому каналу перед опытом (регуляторы «Установка «0»);
• включения записи показаний на потенциометре (тумблер «Запись»).
Первичная обработка экспериментальных данных
При отсутствии взаимного влияния компонентов составляющие нагрузки, действующие на весы, определяются следующим образом:
![]() ;
; ![]() ;
; ![]() , (3.2)
, (3.2)
где ![]() ,
, ![]() ,
,
![]() – составляющие нагрузки на весы
(включая аэродинамические силы и силы тяжести);
– составляющие нагрузки на весы
(включая аэродинамические силы и силы тяжести); ![]() ,
,
![]() ,
, ![]() –
градуировочные коэффициенты соответственно для каналов X, Y, Mz, определяемые
перед опытом;
–
градуировочные коэффициенты соответственно для каналов X, Y, Mz, определяемые
перед опытом; ![]() ,
, ![]() ,
, ![]() –
показания потенциометра по каждому каналу в единицах шкалы (количество делений
на диаграмме).
–
показания потенциометра по каждому каналу в единицах шкалы (количество делений
на диаграмме).
В весах, используемых в настоящей работе, из-за недостаточной жесткости горизонтальных балочек в упругом параллелограмме «Х» (см. рис. 3.4) компоненты Y и Mz влияют на показания компонента Х, поэтому истинные составляющие нагрузки вычисляются так:
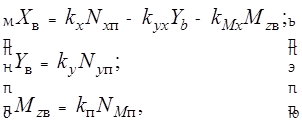 (3.3)
(3.3)
где ![]() ,
, ![]() –
коэффициенты, учитывающие взаимное влияние соответственно компонентов Y и Mz на показания
компонента Xв. Коэффициенты
–
коэффициенты, учитывающие взаимное влияние соответственно компонентов Y и Mz на показания
компонента Xв. Коэффициенты ![]() и
и ![]() зависят от геометрических параметров
тензовесов и для данных весов являются постоянными, в отличие от градуировочных
коэффициентов, которые зависят прежде всего от напряжения питания.
зависят от геометрических параметров
тензовесов и для данных весов являются постоянными, в отличие от градуировочных
коэффициентов, которые зависят прежде всего от напряжения питания.
При обработке экспериментальных данных необходимо учесть следующие обстоятельства:
1) проекции Xви Yв результирующей силы, действующей на весы, измеряются в связанной с весами системе координат;
2) момент Mzв, измеряемый весами, – это момент внешних сил относительно места наклейки соответствующих тензодатчиков. Его значение необходимо только как промежуточный результат. В дальнейшем при обозначении этого момента будем добавлять индекс «п», чтобы не путать его с моментом относительно передней кромки;
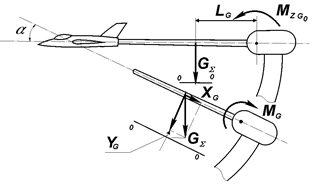
3) кроме аэродинамической нагрузки при помощи весов измеряют еще и изменения проекции силы тяжести модели, державки и части самих весов GSпри изменении угла атаки.
Выставляя нули до опыта по каждому каналу, мы принимаем за нули проекцию суммарного веса GS на ось OY и момент MzG от GS. При изменении угла атаки модели проекции GS на оси весов меняются, и даже при отсутствии аэродинамических сил весы будут давать следующие нагрузки (рис. 3.7):
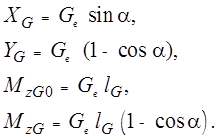 (3.4)
(3.4)
Таким образом, при испытаниях показания приборов складываются из показаний от действия аэродинамических сил и сил тяжести. Следовательно,
 (3.5)
(3.5)
где составляющие показаний приборов Nx, Ny, NM – вызваны аэродинамической нагрузкой на модель; NxG, NyG, NMG – обусловлены весом модели, державки и части весов. Обычно NxG соизмеримо с Nx, и может быть даже больше, чем Nx, а NyG <<Ny, NMG <<NM, поэтому в рамках лабораторной работы для определения показаний соответствующих аэродинамических сил можно пользоваться соотношениями:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.