Содержание
|
Лист |
|
Введение |
3 |
|
1 Принцип действия БДПТ |
4 |
|
2 Основные элементы конструкции |
4 |
|
2.1 Конструкции статоров |
4 |
|
2.2 Конструкции роторов |
5 |
|
2.2.1 Роторы с диаметрально-намагниченными магнитами |
5 |
|
2.2.2 Роторы с тангенциально-намагниченными магнитами |
7 |
|
2.2.3 Роторы высокоскоростных двигателей |
14 |
|
2.2.4 Когтеобразные роторы |
16 |
|
3. Датчики положения ротора |
19 |
|
3.1 ДПР с фотоэлектронными элементами |
19 |
|
3.2 ДПР с ёмкостными элементами |
19 |
|
3.3 Индуктивные датчики ЭДС вращения |
20 |
|
3.4 Датчики Холла |
20 |
|
3.5 Магниточувствительные сопротивления |
20 |
|
3.6 Магнитодиоды |
20 |
|
3.7 Индуктивные ДПР с переменным воздушным зазором |
20 |
|
3.8 Индуктивные ДПР с подмагничиванием магнитной цепи |
21 |
|
Библиографический список |
23 |
Введение
![]() Прогресс в области полупроводниковых
приборов (появление
разнообразных по эксплуатационным параметрам транзисторов, силовых
диодов, управляемы кремниевых вентилей) создал предпосылки к разработка бесконтактных
двигателей постоянного тока. Двигателей этого типа по своим энергетическим показателям
не уступают,
а в ряде случаев превосходят обычные коллекторные машины. Срок их службы
весьма длительный и определяется
в основном работоспособностью подшипников, а
срок хранения практически неограничен. Двигатели могут выполняться бесшумными и работать в тяжёлых условиях.
Прогресс в области полупроводниковых
приборов (появление
разнообразных по эксплуатационным параметрам транзисторов, силовых
диодов, управляемы кремниевых вентилей) создал предпосылки к разработка бесконтактных
двигателей постоянного тока. Двигателей этого типа по своим энергетическим показателям
не уступают,
а в ряде случаев превосходят обычные коллекторные машины. Срок их службы
весьма длительный и определяется
в основном работоспособностью подшипников, а
срок хранения практически неограничен. Двигатели могут выполняться бесшумными и работать в тяжёлых условиях.
При использовании стандартных полупроводниковых элементов размеры бесконтактных двигателей с полупроводниковыми коммутирующими устройствами больше размеров коллекторных машин, однако разработка специализированных полупроводниковых приборов позволит в дальнейшем значительно снизить эти размеры. В настоящее время бесконтактные двигатели постоянного тока могут успешно применяться для портативной звукозаписывающей аппаратуры, привода ряда механизмов и устройств повышенной надежности, питаемых от химических или лучевых источников энергии, и в установках, работающих при повышенных температурах, в условиях глубокого вакуума и в агрессивных средах при наличии вибраций и значительных ускорений.
Электрические машины с полупроводниковыми переключающими устройствами, питаемые от источников постоянного тока, по характеру работы коммутаторов можно, но разделить на машины с независимой, полузависимой и зависимой коммутацией.
К первому классу относятся все машины, частота на выходе коммутирующего устройства которых не зависит, от скорости вращения двигателя. Такие устройства по существу представляют собой полупроводниковый статический преобразователь постоянного тока в переменный и машину переменного тока – асинхронную, синхронную или гистерезисную.
Ко второму классу относятся машины с коммутирующимиустройствами, частота на выходе которых может менятся в некоторых пределах в зависимости от скорости вращения, чем достигается улучшение пусковых пусковых свойств двигателей. Здесь возможно применение асинхронных или синхронных двигателей.
К третьему классу относятся машины, частота на выходе коммутирующего устройства которых жестко связана со скоростью вращения двигателя, так же как обычных коллекторных машинах постоянного тока. Название машины получили название бесконтактных машин постоянного тока. В настоящей книге рассматривается именно этот класс машин.
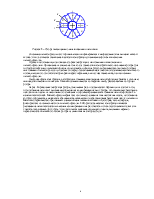
В зависимости от выполнения системы возбуждения бесконтактные двигатели постоянного тока можно делить в соответствии с классификацией синхронных машин на радиально-возбуждаемые и аксиально-возбуждаемые. Первые характеризуются расположением катушек возбуждения или постоянных магнитов по радиусам машины, вторые положением катушек и магнитов вдоль оси машины. К группе радиально-возбуждаемых машин относя магнитоэлектрические машины с вращающимися магнитами и электромагнитные машины с вращающимися выпрямителями. В машинах последнего типа энергия в возбуждения передается на ротор электромагнитным путём. Магнитоэлектрические двигатели могут иметь три конструктивные модификации: с общим для всех полюсов магнитом в виде звездочки; с общим внешним кольцевым маг- нитом; с отдельными для каждого полюса призматическими магнитами и полюсны- ми наконечники из магнитомягкого материала.
Электромагнитные машины с вращающимися выпрямителями также выполняются трех модификаций в зависимости от типа устройства, обеспечивающего передачу энергии на ротор, с трансформатором, с динамически трансформатором, с синхронным возбудителем.
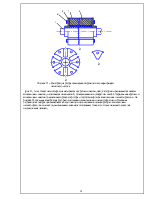
Для аксиально-возбуждаемых машин характерна специальная форма полюсов, обеспечивающая радиальное направление магнитного потока в зубцах якоря аксиальное внутри постоянного магнита или кругл катушки возбуждения. В зависимости от способа возбуждения такие двигатели делятся на магнитоэлектрические с кольцевым магнитом и когтеобразными пол сами и электромагнитные с обмоткой возбуждена Электромагнитные двигатели могут выполняться с радиальными и аксиальными полюсами (типа сексин) или когтеобразными полюсами.
Электромагнитные двигатели с когтеобразны полюсами бывают двух модификаций – с внешним манитопроводом и однопакетным или многопакетным як рем и с составным полым ротором охватывающего или консольного типа. Ротор консольного типа можно выполнять с внутренними или внешними полюсами.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.