![]()
![]()
![]()
|
|
|
|
|
![]()
![]()
![]()
 |
|||||||||
|
|
||||||||
![]()
![]()
![]()
![]()
|
Обмотку возбуждения замыкают накоротко через амперметр. К обмотке статора подводят пониженное напряжение, такое, чтобы ток в ней не превышал номинального.
Затем ротор медленно поворачивают вручную и наблюдают за показаниями приборов в цепи статора и ротора. При положении ротора, когда ток в обмотках статора и ротора достигает максимального значения, производят замер тока, напряжения и мощности, потребляемых статором.
Результаты замеров заносятся в таблицу 10.
Таблица 10
|
Umin |
Imax |
Pmax |
|
|
|
|
|
|
|
|
В |
А |
Вт |
Ом |
Ом |
Ом |
о.е. |
о.е. |
о.е. |
|
|
1 |
|||||||||
|
2 : |
Расчет переходных сопротивлений проводится по формулам:
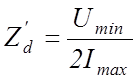 ;
; 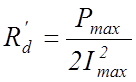 ;
;
 . (17)
. (17)
Результаты расчетов заносятся в таблицу 10.
Вновь поворачивая ротор, находят положение, при котором ток в обмотке статора достигает наименьшего значения, а в обмотке возбуждения становится равным 0.
Расчет параметров проводится по формулам:
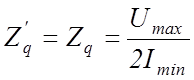 ;
;  ;
;
 . (18)
. (18)
Результаты замеров и расчетов заносятся в таблицу 11.
Таблица 11
|
Umax |
Imin |
Pmin |
|
|
|
|
|
|
|
|
В |
А |
Вт |
Ом |
Ом |
Ом |
о.е. |
о.е. |
о.е. |
|
|
1 |
|||||||||
|
2 : |
3.11 Расчетный метод определения сопротивления обратной
последовательности
В соответствии с принятыми допущениями индуктивное сопротивление обратной последовательности X2 может быть вычислено через параметры переходного режима по формулам:
 (19)
(19)
или
 .
(20)
.
(20)
3.12 Сравнение параметров, определенных различными методами
Наиболее точные результаты дают непосредственные методы определения параметров (пункты 3.3, 3.6, 3.7). Значения сопротивлений, полученные по этим пунктам, могут быть приняты за базовые. Все другие значения – дают дополнительные погрешности, которые в данной работе следует определить по формуле:
 ,
(21)
,
(21)
где  –
принятое базовое значение параметра,
–
принятое базовое значение параметра, ![]() – значение
параметра, определенное по другому методу.
– значение
параметра, определенное по другому методу.
Результаты расчетов сводятся в таблицы 12, 13 и 14.
Таблица 12 – Определение Xd и Xq
|
|
|
|
|
|
|
По пункту 3.4 |
- |
- |
||
|
По пункту 3.6 |
||||
|
По пункту 3.9 |
- |
- |
||
|
По пункту 3.10 |
- |
- |
Таблица 13 – Определение X2
|
X2, Ом |
|
|
|
|
По пункту 3.4 |
|||
|
По пункту 3.5 |
|||
|
По пункту 3.7 |
|||
|
По формуле (19) |
|||
|
По формуле (20) |
Таблица 14 – Определение X0
|
X0, Ом |
|
|
|
|
По пункту 3.3 |
|||
|
По пункту 3.4 |
|||
|
По пункту 3.5 |
3.13 Расчет постоянной времени якоря и токов в переходных режимах
По результатам расчетов и экспериментов рассчитываются следующие величины:
– постоянная времени обмотки якоря, с:
 ,
(22)
,
(22)
где w1 – угловая частота сети, w1=2pf;
– ударный ток однофазного короткого замыкания, А:
 , (23)
, (23)
где КЕ – отношение ЭДС к напряжению под нагрузкой, КЕ=1,05,
Кзат – коэффициент, учитывающий затухание ударного тока через полпериода, Кзат=0,9;
– установившийся ток однофазного короткого замыкания, А:
 ;
(24)
;
(24)
– ударный ток трехфазного короткого замыкания, А:
 ;
(25)
;
(25)
– установившийся ток трехфазного короткого замыкания, А:
 .
(26)
.
(26)
В (22)¸(26) – все сопротивления в омах.
4. Контрольные вопросы
4.1 Объяснить физическую сущность Xd и Xq.
4.2 Почему Xq меньше, чем Xd?
4.3 Почему X2 меньше, чем Xd или Xq?
4.4 Почему мало сопротивление нулевой последовательности X0 ?
4.5 Почему активное сопротивление обмотки статора больше омического сопротивления постоянному току?
4.6 Объяснить физическую сущность
сопротивления переходного режима .
.
4.7 Почему ![]() =
Xq?
=
Xq?
4.8 Почему ![]() и
и
![]() определяются при неподвижном роторе?
определяются при неподвижном роторе?
4.9 Как определяются относительные значения индуктивных сопротивлений?
5. Библиографический список
5.1 Костенко Н.П., Пиотровский Л.М. Электрические машины. Ч.2. – М., 1973. – С.174 – 190, 204 – 207.
5.2 Важнов А.И. Электрические машины. – Л., 1968.
5.3 Важнов А.И. Основы теории переходных процессов синхронной машины. - М., 1960.
5.4 Сипайлов Г.А., Кононенко Е.В., Хорьков К.А. Электрические машины (специальный курс) - М., Высш. шк., 1987.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.


 ,%
,% ,%
,% ,%
,% ,%
,%