
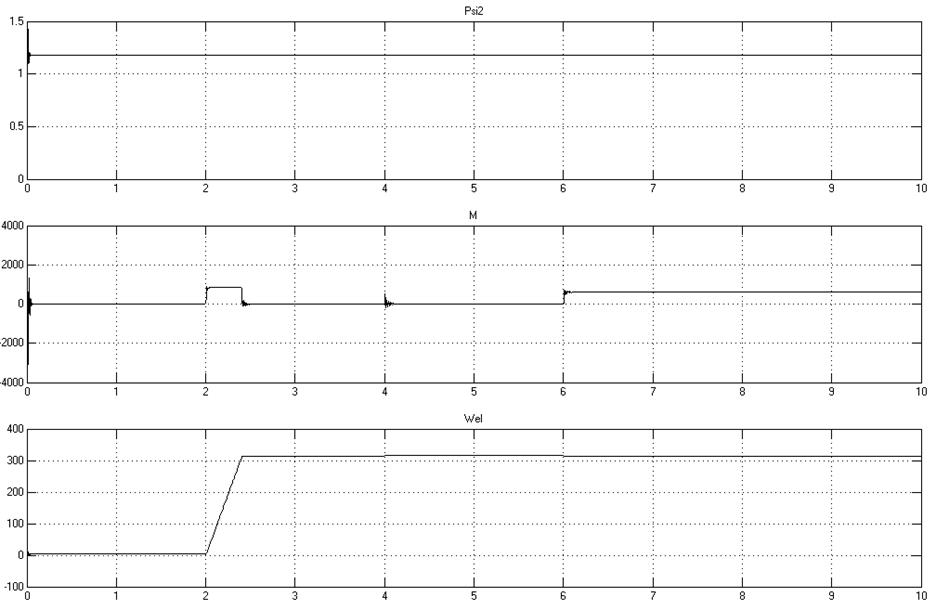
Рис.10. Общий вид переходных процессов
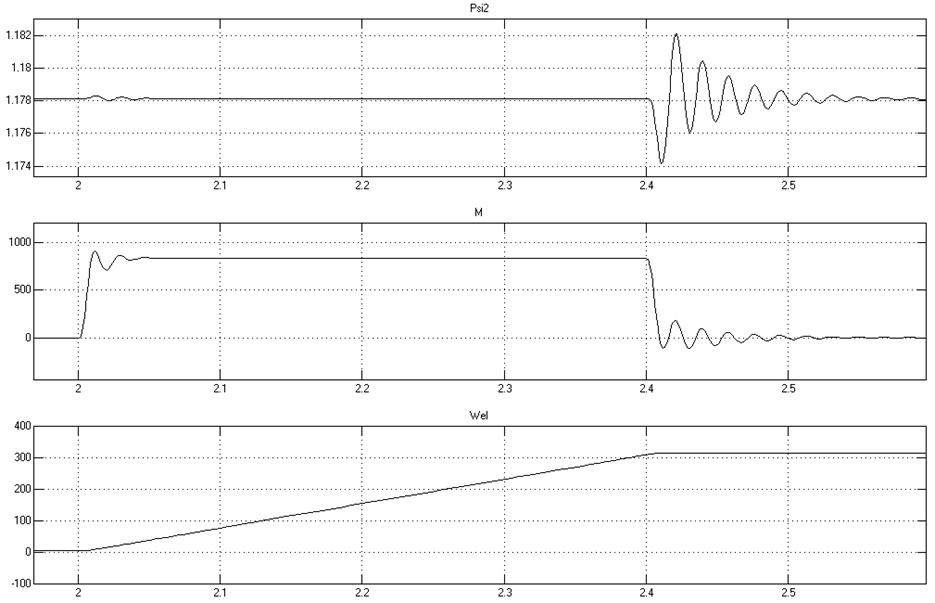
Рис.11. Пуск с ограничением ускорения (t=0.4c)
Рис.12. По заданию
Рис.13. По моменту сопротивления
7. АНАЛИЗ ДИНАМИЧЕСКИХ ПОКАЗАТЕЛЕЙ
Анализ динамики электропривода заключается в определении формы графиков переходных процессов и их основных показателей (перерегулирование и быстродействие).
Расчёт переходных процессов производится в программе MATLAB 6.5. по структурной схеме рис. 4. В данной системе управления, как показывают расчёты, переходные процессы в упрощенной и точной моделях различаются только в начальный момент времени в переходном процессе подачи сигнала задания потокосцепления. Поэтому допустимо рассчитывать переходные процессы по упрощенной модели, представленной на рис.4.
В первом переходном процессе, при подаче сигнала задания потокосцепления, одновременно подаётся задание скорости 5% от UЗС. Процесс пуска сигнала задания скорости формируется с учётом задатчика интенсивности.
После расчёта переходных процессов можно оценить правильность синтеза структуры регуляторов и расчёта их параметров, т.е. оценить качество настройки регуляторов. Технический оптимум (ТО) обеспечивает отсутствие статической ошибки по управлению, перерегулирование (σ% = 4,3%), время переходного процесса tпп = 8,4⋅Tµ.
Эти показатели можно взять за контрольные путём сравнения их с полученными по переходным процессам, сделать выводы о качестве настройки регуляторов.
Малая постоянная времени контура скорости: Tµω = 3 мс.
Контур скорости настроен на ТО:
Tппω=⋅ Tµω=8,4⋅0,003=0,0252 с
Из переходных характеристик получим при обработке задания скорости в «большом»: t=0,1 c, т.е. быстродействие хуже ожидаемого.
Перерегулирование контура скорости:

Из переходных характеристик получим при набросе скачка задания скорости в «малом»: t=0,06 с, т.е. быстродействие, при скачке задания скорости хуже ожидаемого.
Перерегулирование контура скорости:
 , что меньше, чем допустимое перерегулирование
при оптимизации на ТО.
, что меньше, чем допустимое перерегулирование
при оптимизации на ТО.
Перерегулирование скорости в «малом» и «большом» меньше планируемого. Можно сделать вывод о хорошей настройке регуляторов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.