где Uоп мах = 8В амплитуда пилообразного опорного напряжения СИФУ.
Приращения ЭДС преобразователя, тока якоря и напряжения управления (6-ая, 7-ая и 8-ая колонки таблицы 3.1) определяются как разность соседних значений соответствующих величин
Таблица 3.1.
Данные для построения регулировочных характеристик преобразователя в режиме прерывистого тока.
|
Eя,В |
Iя,А |
α,рад |
Ed,B |
Uy,B |
ΔIя,А |
ΔEd,B |
ΔUy,B |
Ктп,о.е. |
|
144,96 |
0 |
90 |
144,96 |
0 |
― |
― |
― |
― |
|
0,35 |
80 |
145,36 |
0,8889 |
0,35 |
0,4 |
0,8889 |
0,45 |
|
|
2,58 |
70 |
147,92 |
1,7778 |
2,23 |
2,56 |
0,8889 |
2,88 |
|
|
7,8 |
60 |
153,93 |
2,6667 |
5,22 |
6,01 |
0,8889 |
6,7613 |
|
|
186,35 |
0 |
80 |
186,35 |
0,8889 |
― |
― |
― |
― |
|
0,3 |
70 |
186,7 |
1,7778 |
0,3 |
0,35 |
0,8889 |
0,3937 |
|
|
2,18 |
60 |
188,86 |
2,6667 |
1,88 |
2,16 |
0,8889 |
2,43 |
|
|
5,58 |
50 |
192,77 |
3,5556 |
3,4 |
3,91 |
0,8889 |
4,3987 |
|
|
222,09 |
0 |
70 |
222,09 |
1,7778 |
― |
― |
― |
― |
|
0,25 |
60 |
222,38 |
2,6667 |
0,25 |
0,29 |
0,8889 |
0,3262 |
|
|
1,76 |
50 |
224,11 |
3,5556 |
1,51 |
1,73 |
0,8889 |
1,9463 |
|
|
5 |
40 |
227,84 |
4,4444 |
3,24 |
3,73 |
0,8889 |
4,1962 |
|
|
251,07 |
0 |
60 |
251,07 |
2,6667 |
― |
― |
― |
― |
|
0,2 |
50 |
251,3 |
3,5556 |
0,2 |
0,23 |
0,8889 |
0,2588 |
|
|
1,22 |
40 |
252,47 |
4,4444 |
1,02 |
1,17 |
0,8889 |
1,3162 |
|
|
3,4 |
30 |
254,98 |
5,3333 |
2,18 |
2,51 |
0,8889 |
2,8237 |
|
|
272,43 |
0 |
50 |
272,43 |
3,5556 |
― |
― |
― |
― |
|
0,1 |
40 |
272,55 |
4,4444 |
0,1 |
0,12 |
0,8889 |
0,135 |
|
|
0,68 |
30 |
273,21 |
5,3333 |
0,58 |
0,66 |
0,8889 |
0,7425 |
|
|
1,5 |
20 |
274,16 |
6,2222 |
0,82 |
0,95 |
0,8889 |
1,0688 |
Коэффициент передачи (9-ая колонка таблицы 3.1) преобразователя определяется как отношение
По уравнению регулировочной характеристики
задавая uу = - Uоп мах,..., Uоп мах строится характеристика преобразователя для режима непрерывного тока. По этой характеристике, по наклону касательной в рабочей точке, соответствующей номинальному напряжению двигателя, определяется коэффициент передачи преобразователя для режима непрерывного тока Ктп = 31,7 (Приложение 2).
Затем, по данным из таблицы 3.1, в этих же осях строится семейство характеристик режима прерывистого тока. Выбирается рабочая точка, ближайшая к режиму электропривода с моментом сопротивления холостого хода. В этой точке определяется по наклону касательной значение внутреннего сопротивления преобразователя Rп' и рассчитывается полное сопротивление якорной цепи для режима прерывистого тока. Для ближайших значений тока и ЭДС преобразователя выбирается значение коэффициент передачи преобразователя для режима прерывистого тока Kтп’= 4,2
Rя' = Rяд+Rп' = 0,88 + 11,25 = 12,13 Ом
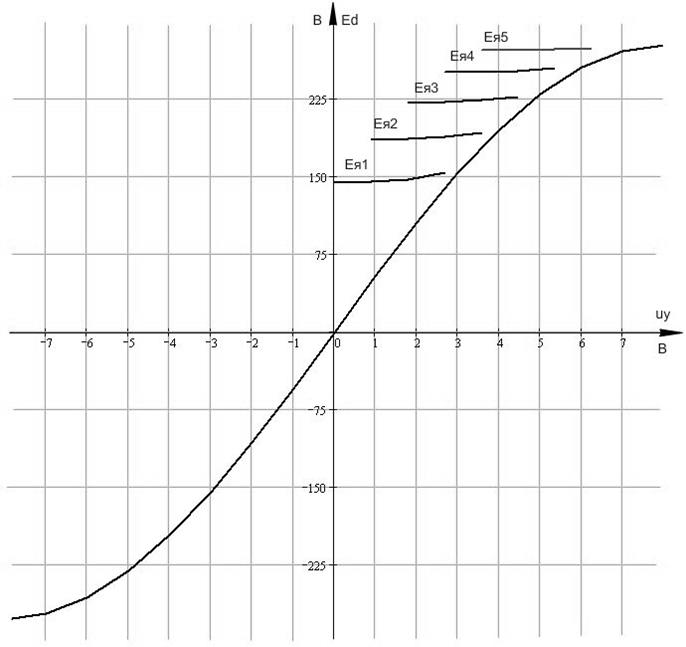
Рис. 2. Регулировочные характеристики преобразователя в режимах непрерывного и прерывистого тока.
4. Выбор структуры системы управления. Расчет параметров структурной схемы
Исходя из характера рабочей машины, выбираю однозонную
систему управления.
Так как возможен режим работы "на упор", то следует применять 2 контура регулирования (внутренний контур тока якоря и внешний контур скорости). В канале управления возбуждением всегда следует применять 2 контура (внутренний контур регулирования тока возбуждения и внешний контур ЭДС якоря).
Полная структурная схема всей системы управления с двумя контурами регулирования в якорном канале приведена на рис. 3. Структурная схема линеаризованной модели, используемая для синтеза контуров регулирования - на рис. 4.
Параметры двигателя и преобразователей уже определены.
Коэффициенты влияния сетевого напряжения определяются видом силовой схемы соответствующего преобразователя и имеют значение, обратное схемному коэффициенту
Выбираем вначале номинальные значения сигналов задания всех регулируемых переменных: скорости Uзсн =10В , тока якоря Uзтн =5 В. Выбирать номинальные значения следует так, чтобы максимально возможное значение сигнала не превышало напряжения насыщения операционного усилителя.
Требуемые коэффициенты передачи обратных связей определяются выбранными номинальными значениями сигналов задания и номинальными значениями соответствующих переменных
5. Синтез контуров регулирования
5.1 Методом стандартных настроек контуров. Расчет ограничения регуляторов
Настройка контура тока якоря.
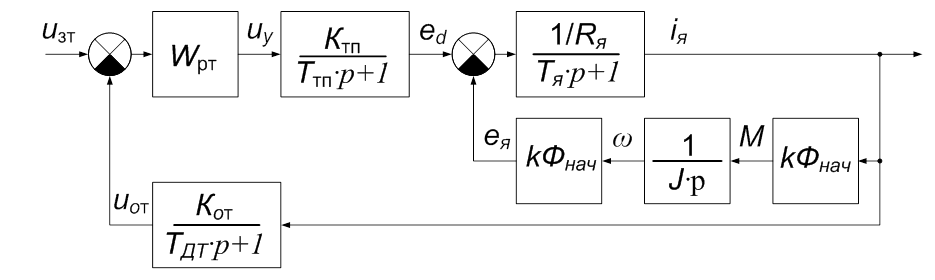
Рис. 5. Структурная схема контура тока якоря.
После сворачивания обратной связи по ЭДС якоря получим передаточную функцию объекта регулирования контура тока
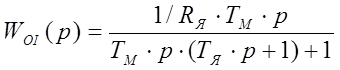
где Тм – электромеханическая постоянная времени

Постоянные времени датчиков скорости, тока Тдс = 0, Тдт =0 (считаем, что датчики безынерционныее)
Малая постоянная контура ![]() 0,00333 с
0,00333 с
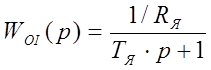
Т.к. выполняется условие Тм > 20ТμI внутренней обратной связью двигателя по ЭДС якоря можно пренебречь. Тогда
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.