МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ
ГОМЕЛЬСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ ИМЕНИ П.О.СУХОГО
Факультет автоматизированных и информационных систем
Кафедра «Автоматизированный электропривод»
Лабораторная работа № 1
по дисциплине: «Элементы в автоматизированном электроприводе»
на тему: «Аналоговые регуляторы»
Исполнитель: студент гр. ЭП-41
Швецов Е.В.
Руководитель: преподаватель
Брель В.В.
Гомель 2012
Цель работы: изучение и исследование характеристик аналоговых регуляторов.
Краткие теоретические сведения
Системы автоматизированного регулирования (САР), применяемые в промышленных установках, должны обеспечить значения самых различных величин с заданной точностью. Основным элементом, позволяющим выполнить указанную функцию, является регулятор. Его реализуют в соответствии с математическими операциями преобразования управляющего сигнала. К типовым видам преобразования относятся: пропорциональное – П; пропорционально-интегральное – ПИ; пропорционально-интегро-дифференциальное – ПИД и ряд других.
Основу аналогового регулятора составляет операционный усилитель (ОУ). Интегральные ОУ, применяемые в промышленной электронике, обладают следующими характеристиками:
- диф. коэф. усиления в разомкнутом состоянии
![]()
- входное
сопротивление ![]() кОм
кОм
- выходное сопротивление ![]() кОм
кОм
- сопротивление
нагрузки ![]() кОм
кОм
- полоса пропускания ![]() МГц
МГц
- напряжение питания Un = ± 15 В (± 12,5 В).
Для построения регуляторов чаще используют схемы включения ОУ с инверсным входом, представленным на рис.1.1 и имеющие передаточные функции:
для схемы на рис.1.1а
 (1)
(1)
для схемы на рис.1.1б
 (2)
(2)
Используя комплексные активно-емкостные сопротивления в обратной связи (Zос) и в потенциометре (Z1, Z2), можно получить регуляторы с разными передаточными функциями.
В САР с постоянными параметрами и структурой П, ПИ и реже ПИД-регуляторы выполняются по схеме на рис.1.1а.
Для облегчения настройки регулятора в конкретной системе и для повышения помехозащищенности (для ПИД и ПД) используют схему на рис.1б. Следует иметь ввиду, что для уменьшения искажений передаточной функции (2) необходимо выполнение следующего условия в полосе пропускания
![]() .
.
Если в процессе работы меняются параметры объекта регулирования САР, то применяют адаптивные (приспосабливающиеся) регуляторы с изменяемой структурой.
Один из вариантов такого регулятора представлен на рис.2. При отсутствии сигнала Uупр управляемый ключ S интегрального исполнения замкнут и передаточная функция соответствует П-регулятору. С подачей сигнала ключ размыкается, в цепь обратной связи ОУ вводится емкость и схема соответствует ПИ-регулятору.
Порядок выполнения работы.
1. Определим передаточную функцию данного регулятора (интегрирующий регулятор с форсированием):
|
Рис. 1.3. Интегрирующий регулятор с форсированием
(изодромное звено)
Передаточная функция регулятора:
где Т1 – постоянная времени:
![]()
Т2 – постоянная времени
![]()
2. Определим передаточные функции адаптивного регулятора, собранного схеме:
|
Рис. 1.4. Адаптивный регулятор
а) ключ DA3.1 разомкнут:
где 

б) ключ DA3.1 замкнут:
3. Соберем схему интегрирующий регулятор с форсированием (рис. 1.3) и проведем ее исследование:
а) снимем и построим амплитудно – частотную характеристику
данные сведем в таблицу1.1:
Таблица 1.1
|
f, Гц |
Uвх, В |
Uвых, В |
A = Uвх/Uвых |
20∙lgА |
|
0,1 0,25 0,5 1 2 5 10 50 100 200 500 1000 |
0,2 0,2 0,2 0,2 0,2 0,2 0,2 0,2 0,2 0,2 0,2 0,2 |
11 4,6 2,7 1,5 1,125 0,95 1 1,05 1 0,95 0,95 1 |
55 23 13,5 7,5 5,625 4,75 5 5,25 5 4,75 4,75 5 |
34,8 27,23 22,6 17,5 15 13,5 14 14,4 14 13,5 13,5 13,5 |
По данным эксперимента построим амлитудно – частотную характеристику (рис. 1.5):
Рис.1.5. Амлитудно – частотная характеристика интегрирующего регулятора с форсированием
Снимем переходную характеристику интегрирующего регулятора с форсированием (рис. 1.6):
Рис. 1.6. Переходная характеристика интегрирующего регулятора с форсированием
4. Соберем схему адаптивного регулятора, снимем и построим его амплитудно – частотные характеристики с замкнутым и разомкнутым ключом DA3.1. Данные сведем в таблицу1.2:
Таблица 1.2
|
f, Гц |
S1 включен |
S1 выключен |
||
|
Uвх, В |
Uвых, В |
Uвх, В |
Uвых, В |
|
|
1 |
1 |
4,8 |
1 |
5 |
|
2 |
1 |
3 |
1 |
5,4 |
|
5 |
1 |
1,5 |
1 |
5,2 |
|
8 |
1 |
1 |
- |
- |
|
10 |
1 |
0,75 |
1 |
5,2 |
|
50 |
1 |
0,16 |
1 |
5,2 |
|
100 |
1 |
0,08 |
1 |
5,2 |
|
200 |
1 |
0,03 |
1 |
5,2 |
|
300 |
1 |
0,018 |
1 |
3,8 |
|
400 |
1 |
0,012 |
1 |
3,2 |
|
500 |
1 |
0,008 |
1 |
2,8 |
|
700 |
1 |
0,005 |
1 |
2,1 |
|
750 |
1 |
0,004 |
1 |
2 |
|
800 |
1 |
0,0035 |
1 |
2 |
|
100 |
1 |
0,0025 |
1 |
1,8 |
|
1450 |
- |
- |
1 |
1 |
|
2000 |
- |
- |
1 |
0,75 |
|
3000 |
- |
- |
1 |
0,5 |
Рассчитаем A = F(ω):
|
f, Гц |
A, при S1 включен |
A, при S1 выключен |
|
1 |
4,8 |
5,2 |
|
2 |
3 |
5,2 |
|
5 |
1,5 |
5,2 |
|
8 |
1 |
- |
|
10 |
0,75 |
5,2 |
|
50 |
0,16 |
5,2 |
|
100 |
0,08 |
5,2 |
|
200 |
0,03 |
5,2 |
|
300 |
0,018 |
3,8 |
|
400 |
0,012 |
3,2 |
|
500 |
0,008 |
2,8 |
|
700 |
0,005 |
2,1 |
|
750 |
0,004 |
2 |
|
800 |
0,0035 |
2 |
|
1000 |
0,0025 |
1,8 |
|
1450 |
- |
1 |
|
2000 |
- |
5 |
|
3000 |
- |
5,4 |
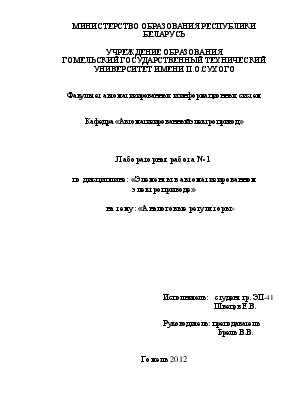
По данным эксперимента построим амлитудно – частотные характеристики:
Рис.1.7. Амлитудно – частотная характеристика адаптивного регулятора (S1 включен).
Рис.1.8. Амлитудно – частотная характеристика адаптивного регулятора (S1 выключен).
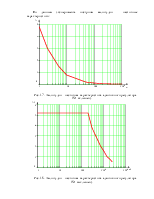
Переходные характеристики:
Рис.1.9. Переходные характеристики адаптивного регулятора:
1 – S1 включен, 2 – S1 выключен
Вывод: В результате выполнения данной лабораторной работы изучил схемы интегрирующего регулятора с форсированием и адаптивного регулятора, а также исследовал их характеристики. При исследовании АЧХ (рис. 1.5) интегрирующего регулятора с форсированием, определил, что интегрирование входного сигнала происходит при малых частотах (в исследуемой схеме примерно от 0,1 до 3 Гц), далее выходной сигнал от частоты входного не зависит.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.