Лабораторная работа №2
“Исследование полупроводникового терморегулятора типа ПТР-П”
1. Цель работы
Целью является ознакомление с устройством и принципом действия полупроводникового терморегулятора пропорционального действия типа ПТР-П, определение характеристик объекта регулирования и регулятора с исполнительным механизмом, а также оценка влияния параметров настройки регулятора на процесс автоматического регулирования температуры.
2. Принцип действия регулятора
Серийно выпускаемый промышленностью полупроводниковый терморегулятор типа ПТР-П предназначен для автоматического регулирования температуры жидких и газообразных сред.
Регулирующее воздействие (изменение подачи теплоносителя в объект) в пределах полного узла поворота выходного вала исполнительного механизма пропорционально отклонению температуры от заданного значения, устанавливаемого с помощью задатчика, встроенного в прибор. Фактическое значение температуры в объекте контролируется чувствительным элементом (датчиком), которым является полупроводниковое термосопротивление (термистр) типа ММТ-1.
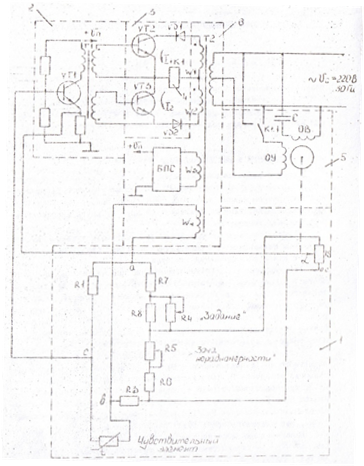
Регулятор состоит из следующих основных узлов: измерительного моста переменного тока 1, полупроводникового предварительного усилителя 2, фазочувствительного усилителя – выпрямителя 3, трёхпозиционного реле 4, управляющего исполнительным механизмом 5, и блока питания 6.
3. Описание лабораторного стенда
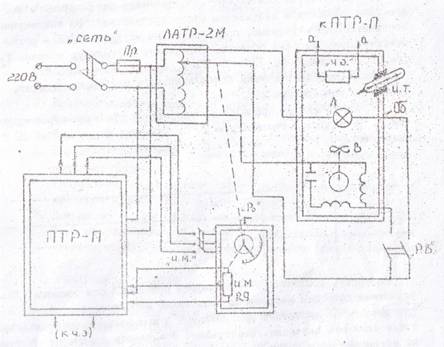
Лабораторный стенд состоит из регулятора ПТР-П с чувствительным элементом – термистором ММТ-1 (ЧЭ), помещённым в объект регулирования имитатора исполнительного механизма (ИМ) с реохордом обратной связи R9, объекта регулирования (Об) с регулирующим органом и индикатора температуры (ИТ), в качестве которого используется ртутный термометр. Объект регулирования представляет собой термокамеру, нагрев которой осуществляется электролампочкой (Л), а охлаждение – вентилятором (В). Электролампочка и вентилятор играют роль регулирующего органа, они питаются от смежных плеч лабораторного автотрансформатора (ЛАТР – 2М) так, что с увеличением накала лампы уменьшаются обороты вентилятора, и наоборот. Движок автотрансформатоа связан с выходным валом исполнительного механизма.
Исполнительный механизм с реохордом обратной связи и автотрансформатор помещены в общий корпус, на верхней панели которого установлены:
- тумблер включения питания (“сеть”)
- тумблер отключения регулирующего воздействия (“РВ”)
- тумблер отключения исполнительного механизма (“ИМ”)
- рукоятка (“Р”) ручного перемещения исполнительного механизма со стрелкой и шкала для отсчёта положения выходного вала
- плавкий предохранитель (ПР)
4. Выполнение работы
Снимаем статическую характеристику регулятора:
Зона неравномерности 1 – θЗmin = 200C
θЗmax = 220C
∆θЗН = 20С
Зона неравномерности 2 – θЗmin = 180C
θЗmax = 220C
∆θЗН = 40С
Зона неравномерности 3 – аналогично зоне неравномерности 2
Имеем следующие параметры регулирования при соответствующих зонах неравномерности:
КРЕГ 1 = 320/2 = 160
КРЕГ2 = 320/4 = 80
По следующей статической характеристике определяем коэффициент усиления объекта KОБ при заданной температуре θЗ = 290C
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

