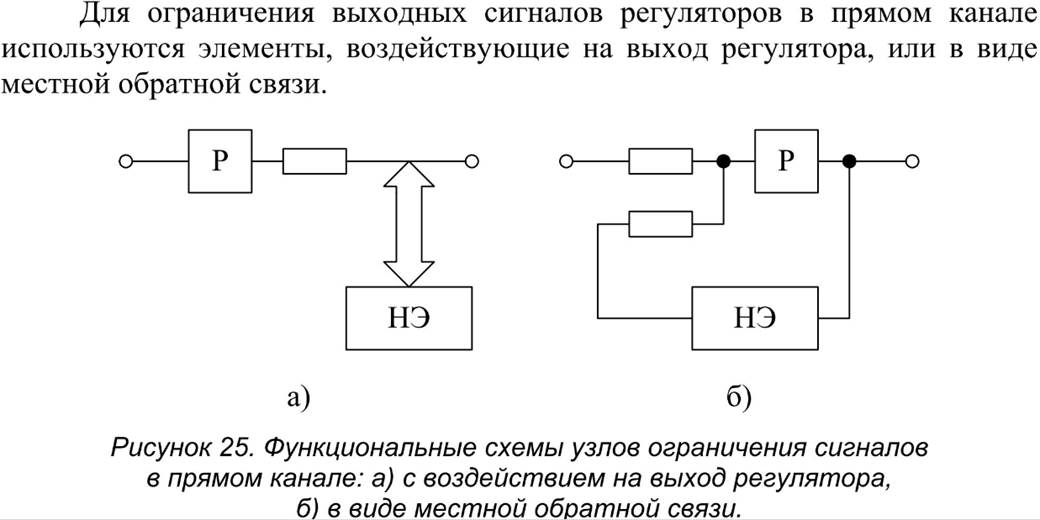
Почти все САУ должны решать задачу ограничения как основной, так и промежуточных координат электропривода. Рассмотрим ряд систем управления с ограничением промежуточных координат.
1. Схема с задержанной обратной связью.
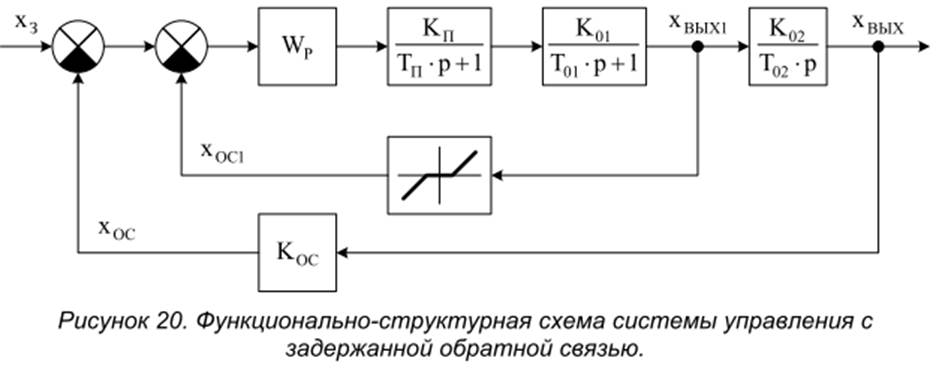
Если ![]() , то обратная связь
по данной координате не работает и система работает как одноконтурная.
Когда
, то обратная связь
по данной координате не работает и система работает как одноконтурная.
Когда ![]() нелинейный
элемент в обратной связи выходит из зоны нечувствительности и
дополнительная обратная связь включается. Коэффициент передачи
дополнительной обратной связи определяется наклоном регулировочной
характеристики нелинейного элемента. И если он достаточно велик, и главной
обратной связью можно пренебречь, то система переходит в режим
стабилизации промежуточной координаты
нелинейный
элемент в обратной связи выходит из зоны нечувствительности и
дополнительная обратная связь включается. Коэффициент передачи
дополнительной обратной связи определяется наклоном регулировочной
характеристики нелинейного элемента. И если он достаточно велик, и главной
обратной связью можно пренебречь, то система переходит в режим
стабилизации промежуточной координаты ![]() . Ее значение
будет соответствовать сигналу задания
. Ее значение
будет соответствовать сигналу задания ![]() . Недостатком такой
системы является возможное ухудшение динамики при одновременной работе
двух обратных связей.
. Недостатком такой
системы является возможное ухудшение динамики при одновременной работе
двух обратных связей.
2. Схема с независимым регулированием координат.
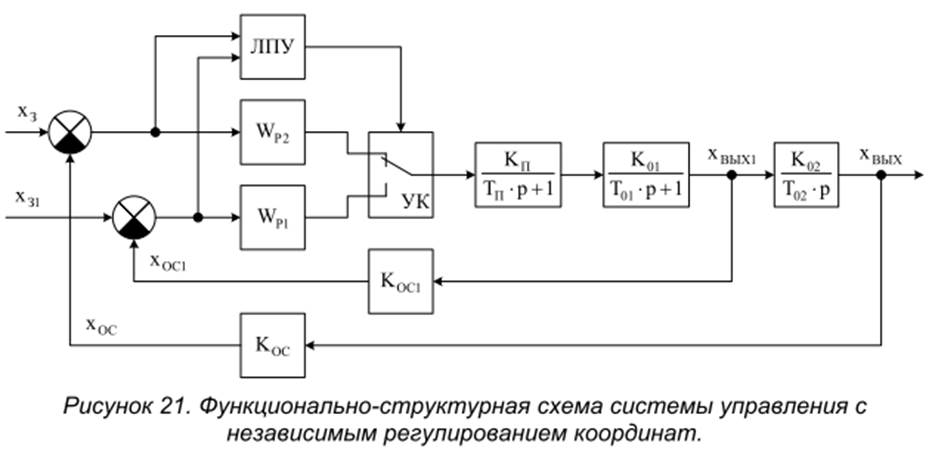
Когда требуется ограничить
промежуточную переменную ![]() логическое переключающее устройство
ЛПУ переключает управляемый ключ УК для получения одноконтурной системы
стабилизации
логическое переключающее устройство
ЛПУ переключает управляемый ключ УК для получения одноконтурной системы
стабилизации ![]() . По главной выходной координате система в
это время разомкнута. На вход ЛПУ подаются сигналы рассогласования. Когда
главная выходная координата будет приближаться к заданному значению, ЛПУ
вернет УК в исходное состояние. Регуляторы для каждой переменной настраиваются
независимо, каждый для своего контура. Недостаток такой системы –
наличие ЛПУ и УК, т.е. усложнение схемы, особенно при необходимости ограничения
нескольких координат.
. По главной выходной координате система в
это время разомкнута. На вход ЛПУ подаются сигналы рассогласования. Когда
главная выходная координата будет приближаться к заданному значению, ЛПУ
вернет УК в исходное состояние. Регуляторы для каждой переменной настраиваются
независимо, каждый для своего контура. Недостаток такой системы –
наличие ЛПУ и УК, т.е. усложнение схемы, особенно при необходимости ограничения
нескольких координат.
3. Схема подчиненного регулирования.

В
системе имеется 2 регулятора, которые работают одновременно, но каждый
настроен для своего контура. Выходной сигнал второго регулятора
является сигналом задания для внутреннего контура регулирования ![]() и ограничен нелинейным звеном на
уровне
и ограничен нелинейным звеном на
уровне ![]() . Нелинейное звено может быть совмещено
с регулятором. В итоге промежуточная координата не превышает максимально
допустимого значения. Особенностью систем подчиненного регулирования
является более низкое быстродействие по сравнению с одноконтурными
системами. Это вызвано тем, что быстродействие внешнего контура ниже
внутреннего для исключения влияние процессов во внутреннем контуре на
динамику внешнего. Из-за этого подобные системы обычно имеют не более 3
контуров.
. Нелинейное звено может быть совмещено
с регулятором. В итоге промежуточная координата не превышает максимально
допустимого значения. Особенностью систем подчиненного регулирования
является более низкое быстродействие по сравнению с одноконтурными
системами. Это вызвано тем, что быстродействие внешнего контура ниже
внутреннего для исключения влияние процессов во внутреннем контуре на
динамику внешнего. Из-за этого подобные системы обычно имеют не более 3
контуров.
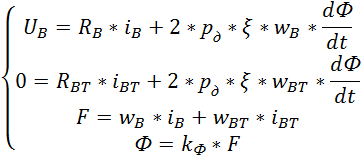
11. Математическое описание ДПТ НВ: схема модели, исходная система уравнений.
Для двигателей средней и большой мощности при управлении
по цепи возбуждения заметное влияние оказывают вихревые токи,
возникающие в массивных частях магнитной системы. Намагничивающая
сила этих токов препятствует изменению магнитного потока полюсов, т.е. затягивает процессы его изменения.
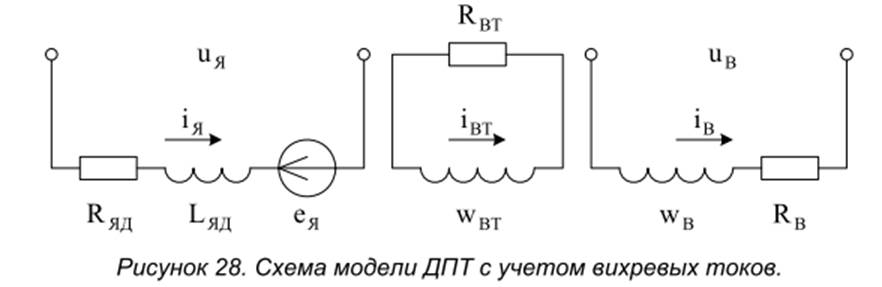
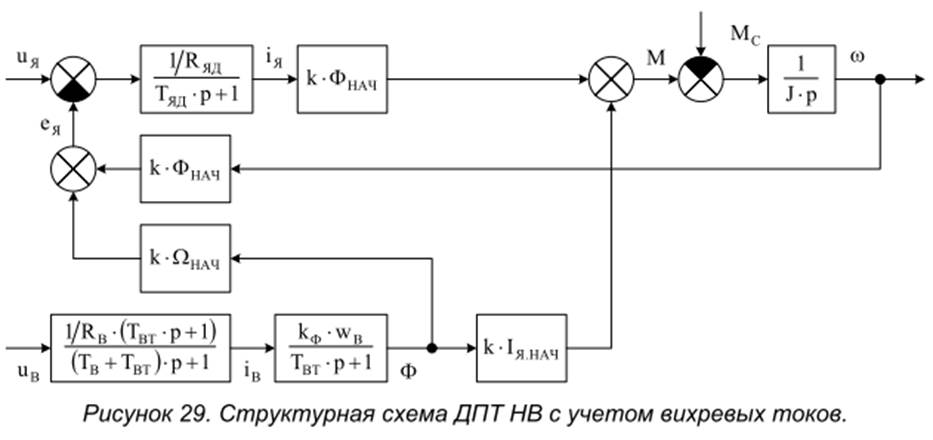
На представленной схеме обозначено:
Rяд,Lяд - сопротивление и индуктивность якорной цепи
двигателя с учетом компенсационной обмотки и
обмотки добавочных полюсов;
Wв,Wвт - число витков обмотки возбуждения (на полюс) и
фиктивной обмотки вихревых токов;
Rвт - активное сопротивление фиктивной обмотки
вихревых токов;
Iвт - ток фиктивной обмотки вихревых токов.
Уравнения, описывающие цепь возбуждения:
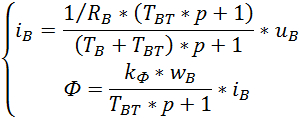
Обозначив постоянные времени:

и пренебрегая малыми второго порядка, получим:
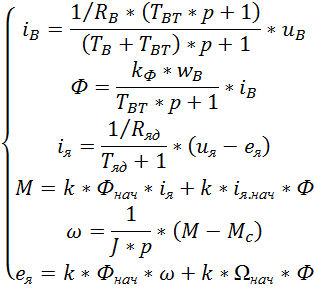
Математическое описание ДПТ НВ: линеаризованная система, и структурная схема.
Линеаризованная система:
Структурная схема:
можно считать, что процессы при увеличении и уменьшении сигнала одинаковы.
Если
преобразователь включен в замкнутую систему с частотой среза, близкой к
граничной ![]() , то необходима проверка на
наличие субгармонических колебаний. Достаточным условием их отсутствия может
служить неравенство
, то необходима проверка на
наличие субгармонических колебаний. Достаточным условием их отсутствия может
служить неравенство
![]()
Преобразователь
представляют апериодическим звеном  ,
, 
В
режиме прерывистого тока ток нагрузки преобразователя нарастает и спадает до
нуля в течении одного интервала проводимости. В этом
случае электромагнитный переходной процесс в якорной цепи не оказывает влияния
на среднее значение тока. Т.о. можно считать Тя=0 . При этом коэффициент
передачи преобразователя резко уменьшается. 
Для
возмущающего воздействия сети используется коэффициент усиления преобразователя
по питающему напряжению при непрерывном токе ![]()
Часто применяют сглаживающий дроссель, из – за :
1. Сам двигатель по условиям нагрева требует ограничения пульсаций тока.
2. Для исключения режима прерывистого тока.
13. Особенности реверсивных ТП
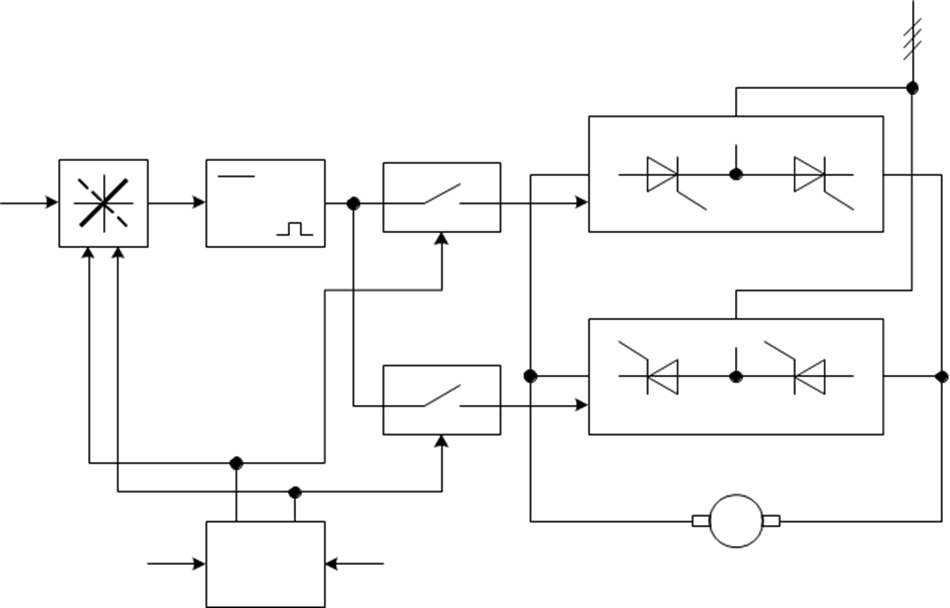 В
реверсивных преобразователях , управление может быть как совместным, так и
раздельным. При совместном управлении каждый комплект имеет свою СИФУ, которые
обеспечивают одновременную работу комплектов. Это приводит к наличию
уравнительного тока. При линейном согласовании углов управления первого
комплекта
В
реверсивных преобразователях , управление может быть как совместным, так и
раздельным. При совместном управлении каждый комплект имеет свою СИФУ, которые
обеспечивают одновременную работу комплектов. Это приводит к наличию
уравнительного тока. При линейном согласовании углов управления первого
комплекта ![]() и второго
и второго ![]() между
ними поддерживается соотношение
между
ними поддерживается соотношение ![]() . Если отсутствует
уравнительный реактор, то ток носит начально-непрерывный характер, внешние
характеристики практически линейны. Преобразователь можно рассматривать как источник
с двухсторонней проводимостью. При раздельном управлении имеется только одна
СИФУ и импульсы подаются только на один из комплектов. При этом уравнительный
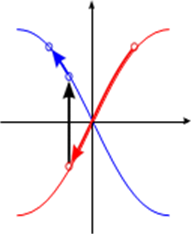
ток отсутствует, но возможен режим прерывистого тока. Упрощенная функциональная
схема представлена на рис.1. На рис.2 показана диаграмма изменения сигналов при
реверсе. От точки 1 до точки 2 при уменьшении сигнала управления происходит
уменьшение и смена полярности ЭДС преобразователя. В точке 2 ЭДС
преобразователя становится равна ЭДС якоря двигателя и ток якоря двигателя
становится равным нулю. При этом ЛПУ меняет полярность характеристики ПХ и
производит переключение комплекта “ В” на “ Н” (переход на точку 3). Затем, при
дальнейшем уменьшении сигнала задания, уменьшается ЭДС преобразователя и ток
якоря продолжает нарастать в отрицательную сторону.
. Если отсутствует
уравнительный реактор, то ток носит начально-непрерывный характер, внешние
характеристики практически линейны. Преобразователь можно рассматривать как источник
с двухсторонней проводимостью. При раздельном управлении имеется только одна
СИФУ и импульсы подаются только на один из комплектов. При этом уравнительный
ток отсутствует, но возможен режим прерывистого тока. Упрощенная функциональная
схема представлена на рис.1. На рис.2 показана диаграмма изменения сигналов при
реверсе. От точки 1 до точки 2 при уменьшении сигнала управления происходит
уменьшение и смена полярности ЭДС преобразователя. В точке 2 ЭДС
преобразователя становится равна ЭДС якоря двигателя и ток якоря двигателя
становится равным нулю. При этом ЛПУ меняет полярность характеристики ПХ и
производит переключение комплекта “ В” на “ Н” (переход на точку 3). Затем, при
дальнейшем уменьшении сигнала задания, уменьшается ЭДС преобразователя и ток
якоря продолжает нарастать в отрицательную сторону.
 |
||||||||||||||||||||||||||||||||||
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.