![]() будет повторять
будет повторять ![]() при низких частотах и
стремиться к нулю при высоких. Характеристики показаны на рис. 55.
при низких частотах и
стремиться к нулю при высоких. Характеристики показаны на рис. 55.
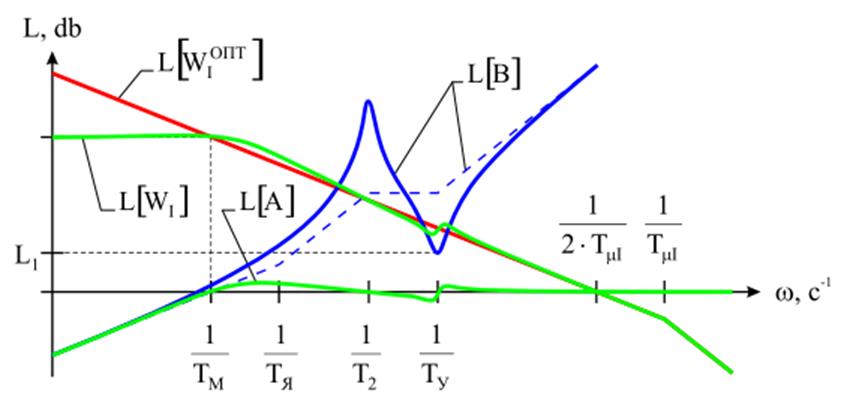
Рисунок 55. Логарифмические характеристики.
Если
на частоте ![]() резонансный провал хар-ки
резонансный провал хар-ки ![]() будет лежать выше 6 db
будет лежать выше 6 db
![]()
то в характеристике контура упругую связь можно не учитывать.
Характеристика
контура будет значительно отличатся от оптимизированной
для жесткой системы только на частотах, меньших ![]() .Условие пренебрежения
обратной связью по ЭДС сохраняется.
.Условие пренебрежения
обратной связью по ЭДС сохраняется.
3. Быстродействие контура настолько велико, что контур успевает отрабатывать возмущение от воздействия ЭДС. Соответствующие характеристики представлены на рис. 56.
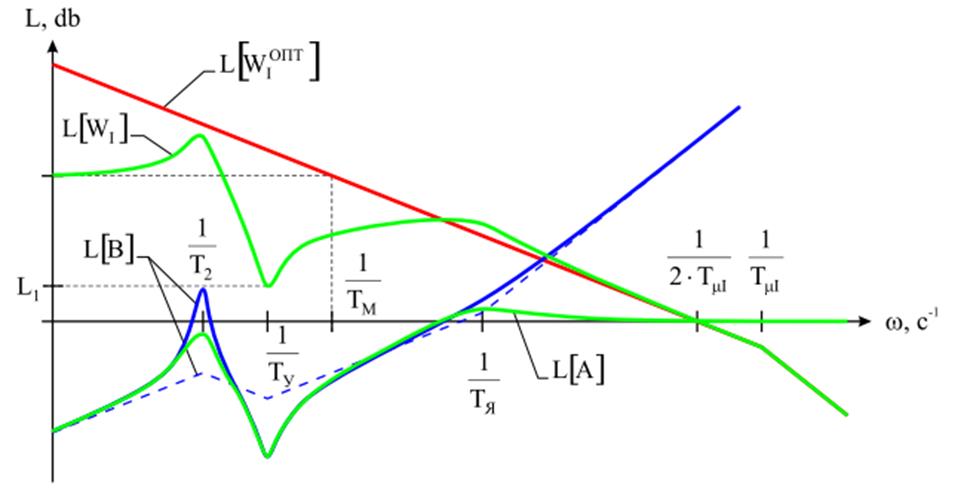
Рисунок 56. Логарифмические характеристики.
Динамические показатели замкнутого контура будут незначительно отличаться
от стандартных если резонансный провал на частоте ![]() характеристики контура с
учетом упругой связи
характеристики контура с
учетом упругой связи ![]() будет лежать выше 6 db
будет лежать выше 6 db
![]()
И чем ниже будет располагаться провал, тем сильнее будет отличие показателей от жесткой системы.
29. Неучет упругой связи при настройке контура скорости
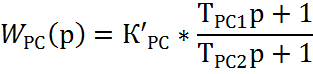
При настройке контура скорости (например на технический оптимум) также можно выделить 3 случая, когда упругой связью можно пренебречь. Запишем передаточную функцию контура в виде
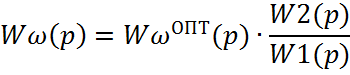
Где ![]() – передаточная функция оптимизированного
на технический оптимум контура для жесткой системы.
– передаточная функция оптимизированного
на технический оптимум контура для жесткой системы.
1. ![]() . Влияние
механической части на контур незначительно
. Влияние
механической части на контур незначительно
![]() ,
, ![]() . Однако при этом система управления не
оказывает демпфирующего влияния на упругие колебания, которые затухают только
под действием внутренних диссипативных сил
. Однако при этом система управления не
оказывает демпфирующего влияния на упругие колебания, которые затухают только
под действием внутренних диссипативных сил
2. Частота упругих колебаний значительно выше частоты среза контура скорости. Соответствующие логарифмические характеристики представлены на рис.1.
Чтобы контур настраивался как и в жесткой системе, необходимо, чтобы резонансный всплеск характеристики контура с учетом упругости
![]() на частоте
на частоте  лежит ниже -6 db.
лежит ниже -6 db.
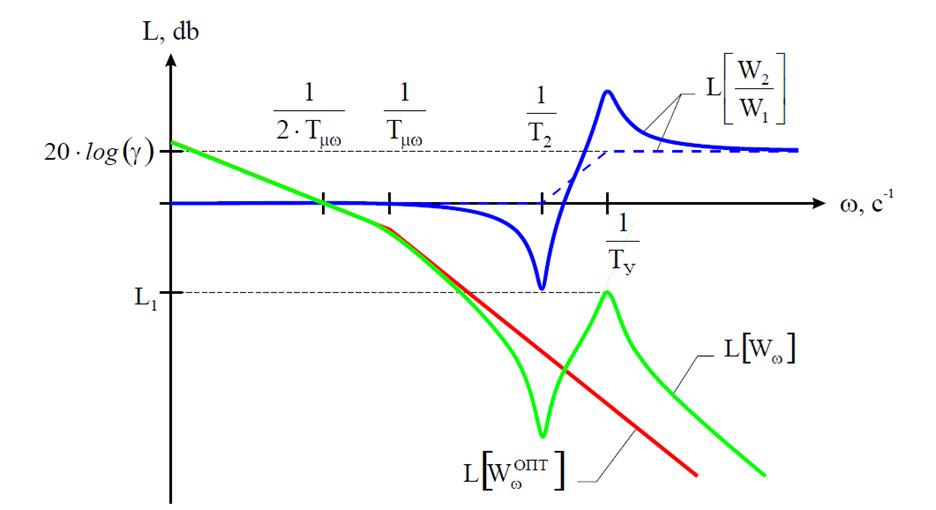
Рис.1 Логарифмические характеристики
3. Если частота среза контура намного больше частоты упругих колебаний
При этом в области высоких частот
Соответствующие характеристики представлены на рис.2
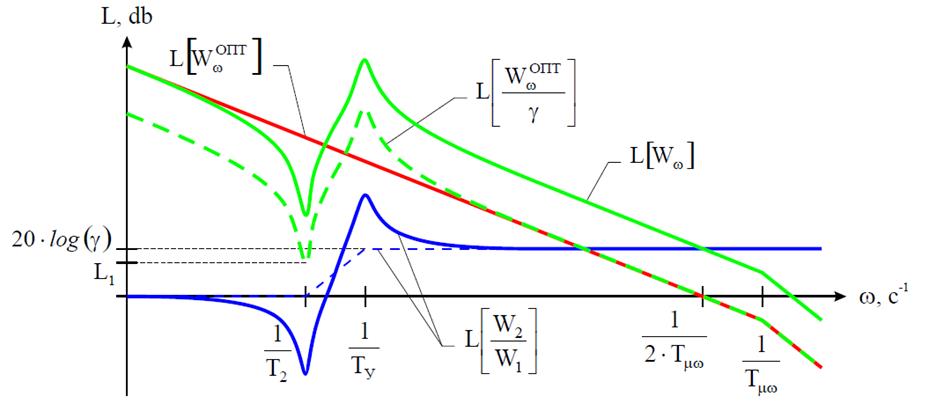
Рис.2 Логарифмические характеристики
Для того чтобы сохранить частоту среза и вид характеристики контура в области
средних и высоких частот необходимо снизить коэффициент передачи регулятора
скорости в γ раз. При этом, для пренебрежения влияния на контур упругой связи
необходимо, чтобы резонансный провал на частоте  характеристики контура (с учетом
уменьшения Крс)
характеристики контура (с учетом
уменьшения Крс) ![]() лежал выше 6 db.
лежал выше 6 db.
Следует однако иметь ввиду, что возможно настройки контуров регулирования как для жесткой системы не означает, что можно пренебречь влиянием упругости на работу системы и движение исполнительного органа.
Для случая 2
Резонансный всплеск для второй массы, соответствующей передаточной функции
Будет
почти полностью компенсирован за счет провала характеристики ![]() на частоте
на частоте  . В характеристике, соответствующей всей
силовой части резонанс будет на частоте , которая выше частоты среза. Амплитуда
колебаний
. В характеристике, соответствующей всей
силовой части резонанс будет на частоте , которая выше частоты среза. Амплитуда
колебаний ![]() будет небольшой.
будет небольшой.
Для случая 3
Если скорость двигателя ω1 будет изменяться как в жесткой системе при
стандартной настройке, электропривод практически не будет демпфировать
колебания исполнительного органа на резонансной частоте и они будут затухать только под
действием внутренних диссипативных с ил.
В последнем случае, как и при необходимости учета упругой связи, для плавного движения исполнительного органа при максимальном быстродействии необходимо либо решать задачу выбора настроек регулятора, либо вводить дополнительные корректирующие устройства
30. Демпфирование упругих колебаний за счет системы управления
Если не выполняется случай 2 для контура скорости и пренебречь упругой связью нельзя, то используются следующие приемы:
1.
При
большом соотношении масс ![]() и высоком быстродействии контура тока
на частоте упругих колебаний
и высоком быстродействии контура тока
на частоте упругих колебаний ![]() и отсутствует влияние
внутренней обратной связи по ЭДС. При достаточно большой
и отсутствует влияние
внутренней обратной связи по ЭДС. При достаточно большой ![]() обычно настройкой контура скорости
добиваются случая 2, чтобы резонансный всплеск логарифмической
характеристики лежал ниже оси частоты.
Но при этом снижается быстродействие. При
обычно настройкой контура скорости
добиваются случая 2, чтобы резонансный всплеск логарифмической
характеристики лежал ниже оси частоты.
Но при этом снижается быстродействие. При ![]()
быстродействие можно увеличить использовав вместо П-регулятора регулятор вида
где
![]() - выбирается по требуемой частоте
среза,
- выбирается по требуемой частоте
среза, ![]() .
.
Если
же внутренняя обратная связь по ЭДС учитывается, то ![]() на частоте
на частоте ![]() имеет провал, что частично
компенсирует резонансный всплеск
для контура скорости. Поэтому иногда специально уменьшают быстродействие
контура тока так, чтобы его частота среза
имеет провал, что частично
компенсирует резонансный всплеск
для контура скорости. Поэтому иногда специально уменьшают быстродействие
контура тока так, чтобы его частота среза ![]() снизилась до значений, близких к
снизилась до значений, близких к ![]() . При этом можно также увеличить
частоту среза контура скорости
. При этом можно также увеличить
частоту среза контура скорости ![]() . Однако, для исключения
низкочастотных колебаний, необходимо, чтобы выполнялось условие
. Однако, для исключения
низкочастотных колебаний, необходимо, чтобы выполнялось условие ![]()
Недостатки такого способа: ухудшение точности регулирования тока, увеличение ошибки системы при изменении напряжения сети.
При ![]() , если контур тока имеет
достаточное быстродействие и
, если контур тока имеет
достаточное быстродействие и ![]() , то при настройке можно не
учитывать малые постоянные времени.
В данном случае используют передаточную функцию в относительных
единицах и дополнительно нормируют, заменяя, оператор
, то при настройке можно не
учитывать малые постоянные времени.
В данном случае используют передаточную функцию в относительных
единицах и дополнительно нормируют, заменяя, оператор
«p» на «s» при их соотношении
где
![]() - коэффициент передачи регулятора
скорости в относительных единицах.
При этом передаточная функция объекта регулирования контура
скорости принимает вид
- коэффициент передачи регулятора
скорости в относительных единицах.
При этом передаточная функция объекта регулирования контура
скорости принимает вид

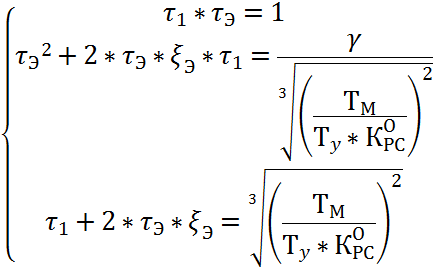
Параметры передаточной функции определяются решением системы уравнений
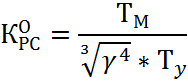
Для
обеспечения плавного движения 2-ой массы необходимо иметь наибольшее
значение коэффициента демпфирования ![]() . Для этого коэффициент передачи
регулятора выбирается равным
. Для этого коэффициент передачи
регулятора выбирается равным
2.![]() . Когда
. Когда ![]() близко к 1
добиться эффективного демпфирования колебаний
только за счет выбора соответствующего регулятора скорости невозможно
без значительного снижения быстродействия. В этом случае вводят
на вход системы обратную связь либо по производной
близко к 1
добиться эффективного демпфирования колебаний
только за счет выбора соответствующего регулятора скорости невозможно
без значительного снижения быстродействия. В этом случае вводят
на вход системы обратную связь либо по производной ![]() либо по разности
либо по разности ![]() . Если реализовать обратную связь невозможно
или нежелательно, то в стационарной системе можно использовать
наблюдатель. Его задачей является по измеренным
. Если реализовать обратную связь невозможно
или нежелательно, то в стационарной системе можно использовать
наблюдатель. Его задачей является по измеренным ![]() вычислить значение
вычислить значение ![]() или
или ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.