Министерство образования Республики Беларусь
Гомельский государственный технический университет
имени П. О. Сухого
Кафедра «Автоматизированный электропривод»
ОТЧЁТ
по лабораторной работе №2
«Моделирование электродвигателя постоянного тока последовательного возбуждения»
Выполнил студент гр. ЭП – 31:
Швецов Е.В.
Проверил преподаватель:
Захаренко В.С.
Гомель 2011
Цель работы:
– ознакомиться с алгоритмами моделирования статических элементов систем автоматического управления;
– ознакомиться с приемами моделирования динамических элементов;
– получить практические навыки составления программ моделирования.
Ход работы
21. Швецов Евгений Викторович
Двигатель Д12, тихоходное исполнение, последовательное возбуждение.
Структурное моделирование. Метод Эйлера.
Используя справочные данные, определяем параметры заданного двигателя:
Напряжение на обмотке якоря
|
|
|
|
Число параллельных ветвей якоря: 2
Сопротивление якоря и добавочных полюсов: 1,63
Номинальный ток двигателя: 15
Частота вращения ротора двигателя: 1150
Число пар полюсов: 2
Число активных проводников якоря: 990
Инерция якоря: 0,05
Магнитный поток на полюс: 0,45
Шаг расчета: 0,0005
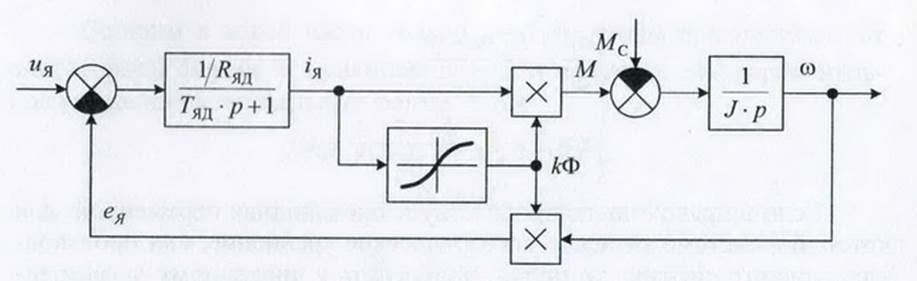
Рис. 1 Структурная схема двигателя постоянного тока последовательного возбуждения без учета фиктивной обмотки вихревых токов.
На рис. 1 обозначено:
uЯ - напряжение на якорной цепи двигателя;
еЯ - ЭДС якоря;
iЯ - ток якоря двигателя;
k · ФВ - произведение конструктивной постоянной двигателя на поток возбуждения;
f(iВ) - функция, отражающая нелинейную зависимость потока возбуждения от тока обмотки возбуждения (для ДПТ ПВ iЯ = iВ);
mДВ - момент двигателя;
mC - момент сопротивления;
ω - угловая скорость вращения двигателя;
RЯ и TЯ - сопротивление и постоянная времени якорной цепи;
J - момент инерции якоря.
Кривую намагничивания для двигателей серии Д можно аппроксимировать кусочно-линейной функцией, представленной на рис. 2.
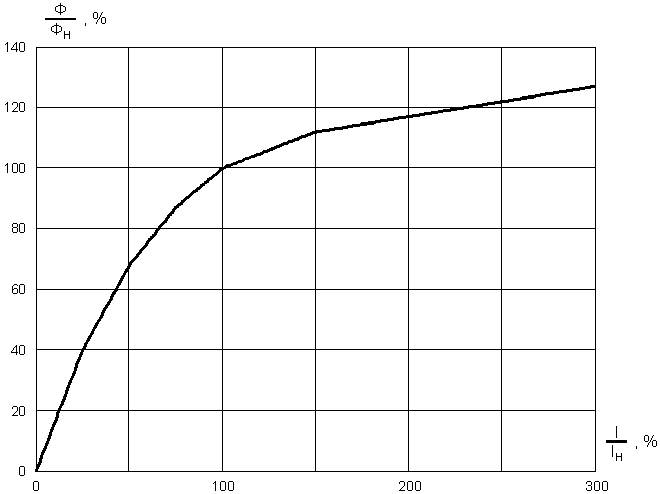
Рис. 2. Кусочно-линейная функция
По осям отложены относительные значения тока и потока двигателя (отнесенные к номинальным значениям). Координаты конечных точек отрезков:
(0%; 0%). (75%; 87%).
(25%; 40%). (100%; 100%).
(50%; 68%). (150%; 112%).
Последний участок характеристики - луч проходящий через точку (250%; 122%).
1. Интегрирующее звено.
Выходной сигнал звена в операторной форме:
y(p)=1/T*p*x(p)
Составим дифференциальное уравнение для выходного сигнала:

Алгебраическое уравнение согласно методу Эйлера:

2. Апериодическое звено.
Выходной сигнал звена в операторной форме:
y(p)=K*x(p)/( T*p+1)
Составим дифференциальное уравнение для выходного сигнала:
Алгебраическое уравнение согласно методу Эйлера:

3. Множительное звено.
Описывается выражением:
Y = X1*X2
4. Вычитательное звено.
Описывается выражением:
Y = X1 - X2
Таблица описания переменных:
|
Переменная |
Описание |
|
u_nom |
Напряжение на обмотке якоря |
|
a |
Число параллельных ветвей якоря |
|
r_z |
Сопротивление якоря и добавочных полюсов |
|
I_n |
Номинальный ток двигателя |
|
n_ob |
Чаcтота вращения ротора двигателя |
|
p |
Число пар полюсов |
|
N |
Число активных проводников якоря |
|
J |
Инерция якоря |
|
F_n |
Магнитный поток на полюс |
|
dt, t |
Интервал и шаг расчета, текущее время |
|
t_start, t_full, t_stop |
Время пуска, работы пи торможения |
|
M_nom |
Номинальный момент |
|
T_z |
Постоянная времени якорной цепи |
|
y, yp |
Значения переменных модели, для которых есть дифференциальные уравнения, на текущем и предыдущем шагах расчета, соответственно |
Кодпрограммы:
Type
DArray=array[1..7] of double;
procedure TForm1.Button4Click(Sender: TObject);
begin
close;
end;
procedure TForm1.Button2Click(Sender: TObject);
var
a,k,k1,n_ob,p,U_nom,w,I_n,t_start,t_full,t_stop,
n,r_z,alpha,L_z,F_n,T_z,M_nom,J,t,dt:double;
y,yp:darray;
i,kol:integer;
function Moment(t,M_nom:double):double;
var
M:double;
begin
if t<=0 then M:=0
else if t<t_start then M:=0.5*M_nom
else if t<t_full then M:=M_nom
else M:=M_nom;
Moment:=M;
end;
function u(t,U_nom:double):double;
begin
u:=0;
if t<=0 then u:=0
else if t<t_start then u:=u_nom
else if t<t_full then u:=u_nom
else if t<t_stop then u:=0;
end;
function sign(x:double):double;
begin
if x>0 then sign:=1
else
if x=0 then sign:=0
else sign:=-1;
end;
function flux(i_1:double):double;
var
i0,kf0,S:double;
begin
S:=sign(i_1);
i_1:=abs(i_1);
i0:=i_1/I_n;
if i0<=0.25 then kf0:=0.4/0.25*i0
else if i0<=0.5 then kf0:=0.4+(0.28/0.25)*(i0-0.25)
else if i0<=0.75 then kf0:=0.68+(0.19/0.25)*(i0-0.5)
else if i0<=1 then kf0:=0.87+(0.13/0.25)*(i0-0.75)
else kf0:=1+(0.12/0.5)*(i0-1);
flux:=s*kf0*k*F_n;
end;
function sum(x,y:double):double;
begin
sum:=x-y;
end;
function multiplier(x,y:double):double;
begin
multiplier:=x*y;
end;
function ap(x,yp,k,T_z:double):double;
var
y:double;
begin
y:=yp+dt*(k*x-yp)/T_z;
y:=yp+dt/2*(((k*x-yp)/T_z)+((k*x-y)/T_z));
ap:=y;
end;
function int(xp,yp,t:double):double;
var
y:double;
i:integer;
begin
for i:=1 to 2 do
y:=yp+dt*xp/t;
int:=y;
end;
procedure scheme(yp:darray;t:double;var y:darray);
var
m,U_z:double;
begin
U_z:=u(t,U_nom);
M:=Moment(t,M_nom);
y[1]:=sum(U_z,y[7]);
y[2]:=ap(y[1],yp[2],k1,T_z);
y[3]:=multiplier(y[2],y[6]);
y[4]:=sum(y[3],M*sign(y[5]));
y[5]:=int(y[4],yp[5],t);
y[6]:=flux(y[2]);
y[7]:=multiplier(y[6],y[5]);
end;
begin
bar2.Progress:=0;
a:=strtofloat(Edit_2a.text);
n_ob:=strtofloat(Edit_n_ob.text);
p:=strtofloat(Edit_p.text);
u_nom:=strtofloat(Edit_u.text);
r_z:=strtofloat(Edit_r.text);
J:=strtofloat(Edit_J.text);
I_n:=strtofloat(Edit_I_n.text);
N:=strtofloat(Edit_n.text);
F_n:=strtofloat(Edit_F_n.text);
dt:=strtofloat(Edit_dt.text);
F_n:=0.01;
w:=3.14*n_ob/30;
alpha:=0.0039;
r_z:=r_z*(1+alpha*(160-20));
L_z:=0.6*U_nom/(p*w*I_n);
k:=p*N/(3.14*a);
T_z:=L_z/R_z;
M_nom:=k*F_n*I_n;
k1:=1/r_z;
t_start:=3;
t_full:=t_start+2;
t_stop:=t_full+1;
kol:=round(t_stop/dt);
bar2.MaxValue:=kol;
fillchar(y,sizeof(y),0);
fillchar(yp,sizeof(yp),0);
Form3.Series1.Clear;
Form3.Series2.Clear;
Form2.series1.clear;
t:=0;
Form3.Series1.AddXY(t,y[2]);
Form3.Series2.AddXY(t,y[5]);
Form2.Series1.AddXY(y[2],y[5]);
bar2.Visible:=true;
for i:=1 to kol do
begin
bar2.Progress:=i;
t:=dt*i;
scheme(yp,t,y);
Form3.Series1.AddXY(t,y[2]);
Form3.Series2.AddXY(t,y[5]);
Form2.Series1.AddXY(y[2],y[5]);
yp:=y;
end;
Button3.visible:=true;
Button1.Visible:=true;
bar2.Visible:=false;
end;
procedure TForm1.Button3Click(Sender: TObject);
begin
Form3.showmodal;
end;
procedure TForm1.Button1Click(Sender: TObject);
begin
Form2.ShowModal;
end;
end.
График переходных процессов
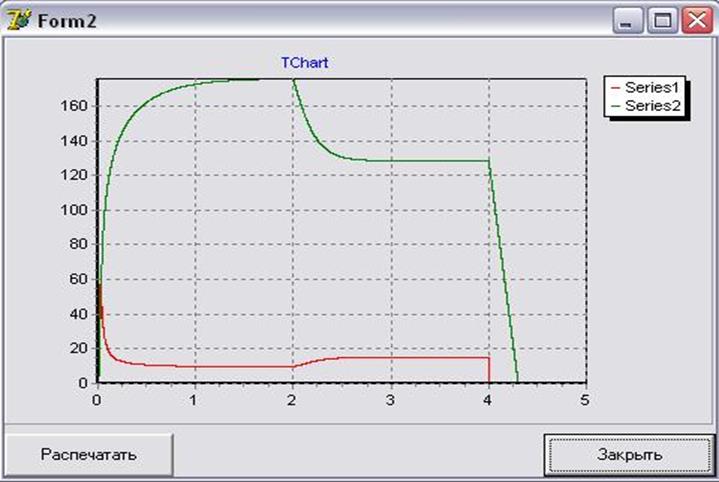
График динамических процессов

Вывод:
Ознакомился с алгоритмами моделирования статических элементов систем автоматического управления, ознакомился с приемами моделирования динамических элементов, получил практические навыки составления программ моделирования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




