где: βК = 0.6 – коэффициент учитывающий наличие компенсационной обмотки,
рД = 2 – число пар полюсов двигателя,
ωН = 59,167 – номинальная угловая скорость вращения двигателя (рад/с);
– конструктивная постоянная двигателя
где: N – число активных проводников якоря,
2а – число параллельных ветвей обмотки якоря;
– произведение конструктивной постоянной на номинальный магнитный поток (Вб)
![]()
– номинальный момент (Н*м)
![]()
В справочниках сопротивления, как правило, приводятся для температуры 150С или 200С. Его необходимо привести к рабочей температуре
![]()
где: α – температурный коэффициент (для меди α = 3.9*10-3),
Δt – разница между допустимой температурой обмотки (выбирается по классу изоляции двигателя (H – 1600С)) и температурой, для которой приведено сопротивление в справочнике (200С).
3. ВЫБОР СИЛОВОГО ОБОРУДОВАНИЯ И РАСЧЁТ ПАРАМЕТРОВ ЭП
Выбор комплектного электропривода производится исходя из вида рабочей машины, для которой рассчитывается электропривод.
Выбираю из справочника комплектный тиристорный электропривод унифицированный серии КТЭУ мощностью до 2000 кВт
КТЭУ-200/220-13213-УХЛ4(-04)
Номер ТУ16-530, 252-79. С параметрами: Iном = 200 А, Uном = 220 В,
1 - количество двигателей: однодвигательный;
3 – режим работы: реверсивный с изменением полярности напряжения на якоре;
2 – исполнение ТП по способу связи с сетью: с трансформатором;
1 – основной регулируемый параметр: ЭДС или скорость, однозонное регулирование;
3 – состав коммутационной аппаратуры силовой цепи: с линейным контактором.
Выбор трансформатора производится по требуемым номинальным напряжению и току преобразователя.
Выбираю трансформатор типа ТСП, трехфазный, двухобмоточный, сухой с естественным воздушным охлаждением, открытого исполнения
ТСП - 63/0,7 – УХЛ4 (230/200)
C параметрами, приведёнными в таблице 3.1.
Таблица 3.1
|
Номин. мощность, кВ*А |
Напр. сетевой обмотки, В |
Вентильная обм. |
Преобразователь |
Потери, Вт |
uк % |
Iхх % |
|||
|
U, В |
I, А |
U, В |
I, А |
Рхх |
Ркз |
||||
|
58 |
380 |
205 |
164 |
230 |
200 |
330 |
1900 |
5,5 |
6 |
Для трансформатора рассчитываются параметры обмотки фазы, приведенные ко вторичной обмотке:
– полное сопротивление:

где uК – напряжение короткого замыкания,
U2НФ – номинальное фазное напряжение вторичной обмотки трансформатора,
I2 - номинальный ток вторичной обмотки трансформатора;
– активное сопротивление

где РКЗ – потери короткого замыкания (Вт);
– реактивное сопротивление (Ом) и индуктивность (Гн)
![]() ,
,

где: ωс = 2πfc – угловая скорость вращения напряжения сети (рад/с).
Расчет параметров якорной цепи двигателя производится по следующим формулам:
– активное сопротивление при мостовой силовой схеме тиристорного преобразователя
![]()
где Rк – коммутационное сопротивление

где р – количество пульсаций выпрямленного напряжения за период сети (р = 6 для трехфазной мостовой схемы выпрямления);
– индуктивность при мостовой силовой схеме тиристорного преобразователя
![]()
– постоянная времени якорной цепи
Момент
инерции ролика: ![]()
Момент инерции металла, прокатываемого по ролику:
 ,
,
где m=2500 кг – масса заготовки на один ролик рольганга,
D=0.5 м – диаметр ролика.
Момент инерции механизма, приведённый к валу электродвигателя:
 ,
,
где i=1.22 – передаточное число редуктора.
Суммарный момент инерции механизма и момента инерции электродвигателя:
![]() ;
;
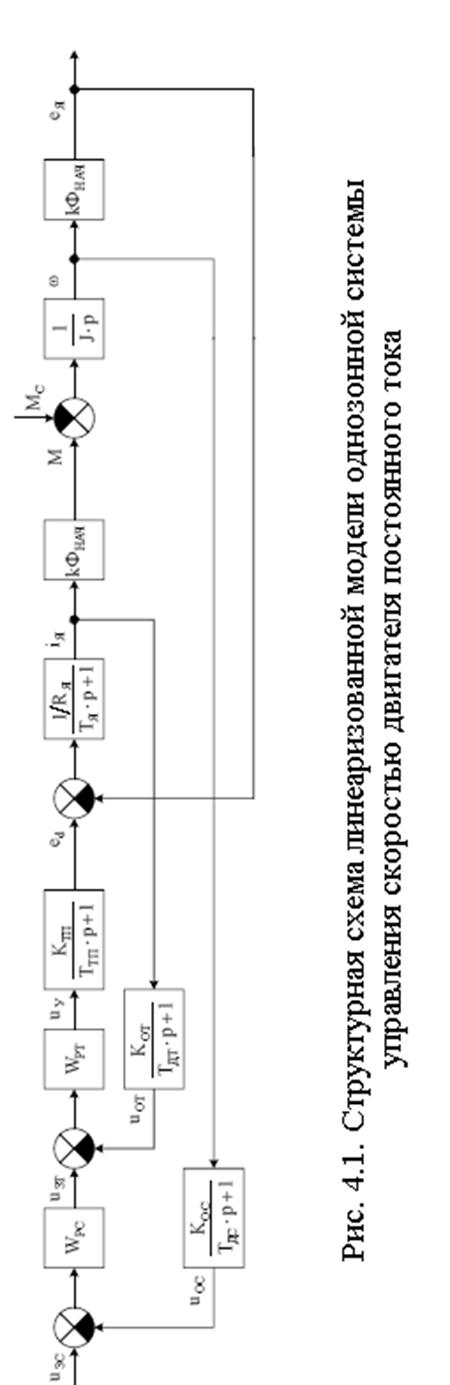
4. РАЗРАБОТКА СТРУКТУРЫ САУ
Исходя из характера рабочей машины, выбираю однозонную систему управления.
Так как возможен режим работы "на упор", то следует применять 2 контура регулирования (внутренний контур тока якоря и внешний контур скорости) в якорном канале системы управления.
Структурная схема линеаризованной модели, используемая для синтеза контуров регулирования - на рис. 4.1.
Выбираем номинальные значения сигналов задания всех регулируемых переменных: скорости Uзсн =5В , тока якоря Uзтн =5В. Выбирать номинальные значения следует так, чтобы максимально возможное значение сигнала не превышало напряжения насыщения операционного усилителя.
Требуемые коэффициенты передачи обратных связей определяются выбранными номинальными значениями сигналов задания и номинальными значениями соответствующих переменных
Т.к. отсутствуют фильтры в канале обратной связи: Tдс, Tдт - постоянные времени принимается равной нулю.
5. СИНТЕЗ САР И ВЫБОР ЭЛЕМЕНТОВ КОНТУРОВ РЕГУЛИРОВАНИЯ
Cинтез регулятора тока
Коэффициент передачи преобразователя:
 ,
где
,
где
Uу – напряжение управления = 10В,
![]() - ЭДС холостого хода
- ЭДС холостого хода
 ,
,
kсх=2.34 – схемный коэффициент силовой цепи преобразователя для трёхфазной мостовой схемы.
![]()
Постоянная времени преобразователя:
 ,
где
,
где
p – пульсность схем.
Электромеханическая постоянная времени:

Малая постоянная контура: ![]()
Т.к. выполняется условие ![]() ,
то внутренней ОС двигателя по ЭДС якоря пренебрегаем. Тогда
,
то внутренней ОС двигателя по ЭДС якоря пренебрегаем. Тогда
Для настройки на ТО необходим ПИ-регулятор:
 ,
,
где Tрт=Tя=0,054 с.
Тогда:
Тогда передаточная функция замкнутого контура тока якоря:
Структурная схема контура тока якоря представлена на рис. 5.1.
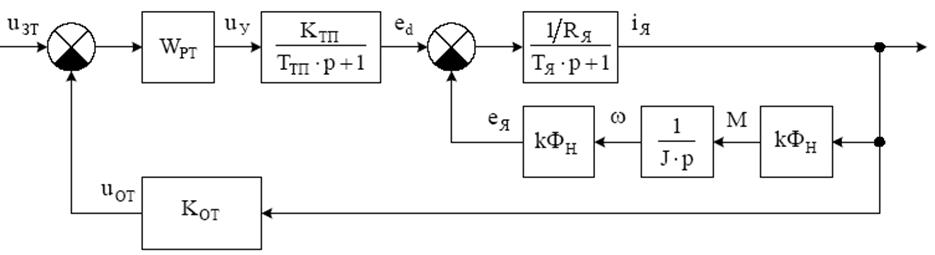
Рис. 5.1. Структурная схема контура тока якоря.
Синтез регулятора скорости
С учетом замены контура тока якоря эквивалентным звеном структурная схема контура скорости, при двухконтурном якорном канале системы управления, будет иметь вид, представленный на рис.5.2.
Передаточная функция объекта регулирования контура скорости
Тогда для настройки на технический оптимум необходим П-регулятор

а малая постоянная времени контура скорости определяется постоянной времени контура тока и постоянной времени датчика скорости

Для получения значения статической ошибки контура по моменту сопротивления запишем передаточную функцию замкнутого контура скорости по возмущению

Тогда величина ошибки составит

При скачке момента от нуля до номинального значения отклонение скорости
составит

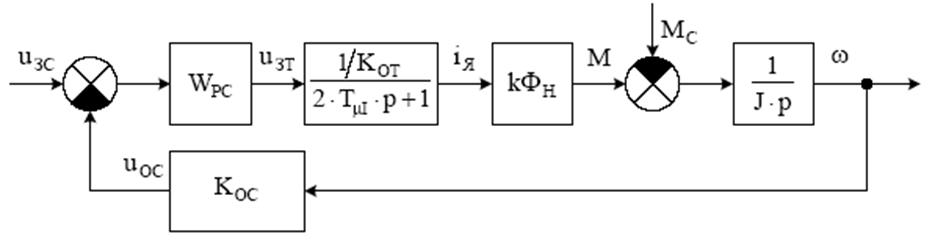 Рис. 5.2. Структурная схема контура скорости
двухконтурной по якорному каналу системы управления
Рис. 5.2. Структурная схема контура скорости
двухконтурной по якорному каналу системы управления
Расчет электрических номиналов элементов регуляторов
1) Регулятор тока.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.