![]()
При настройке на ТО необходим П – регулятор:

Выделим передаточную функцию для контура скорости
Выделим из общей схемы
контур положения 
Рис 4. Контур положения
![]() с
с
Контур скорости при рассмотрении контура положения можно представить апериодическим звеном.
При стандартной настройке контура на ТО можно применить пропорциональный регулятор положения.
![]()
 ,
,
где ![]()
![]()
Регулятор тока.
Рис 5. Регулятор тока
![]()
![]()
Примем R1=2кОм, С2=2мкФ тогда R2=5,6кОм, R3=3кОм,
С1=6.5мкФ
Регулятор скорости.
Рис 6. Регулятор скорости.
Пусть R1 = 2кОм R2=10кОм
Регулятор положения.
Рис 7. Регулятор положения.
Пусть R1 = 1,2кОм R2=15кОм

Рис. 8 Структурная схема контура скорости.
Рис. 9 Преобразования к статическому режиму.
Статическая характеристика контура скорости по управлению:
 (статическая ошибка по управлению равна нулю).
(статическая ошибка по управлению равна нулю).

Δω=1.72∙(Мн-0.4∙Мн)=1.72∙(14-0.4∙14)=14.5

Статическая характеристика контура скорости по возмущению:
![]()
Рис.10. Статическая характеристика контура скорости по возмущению
Анализы динамики системы автоматического управления электроприводом подачи стола вертикально-фрезерного станка заключается в расчетах переходных процессов основных динамических показателей системы.
Расчет переходных процессов произведем в программе Mat Lab6.5.
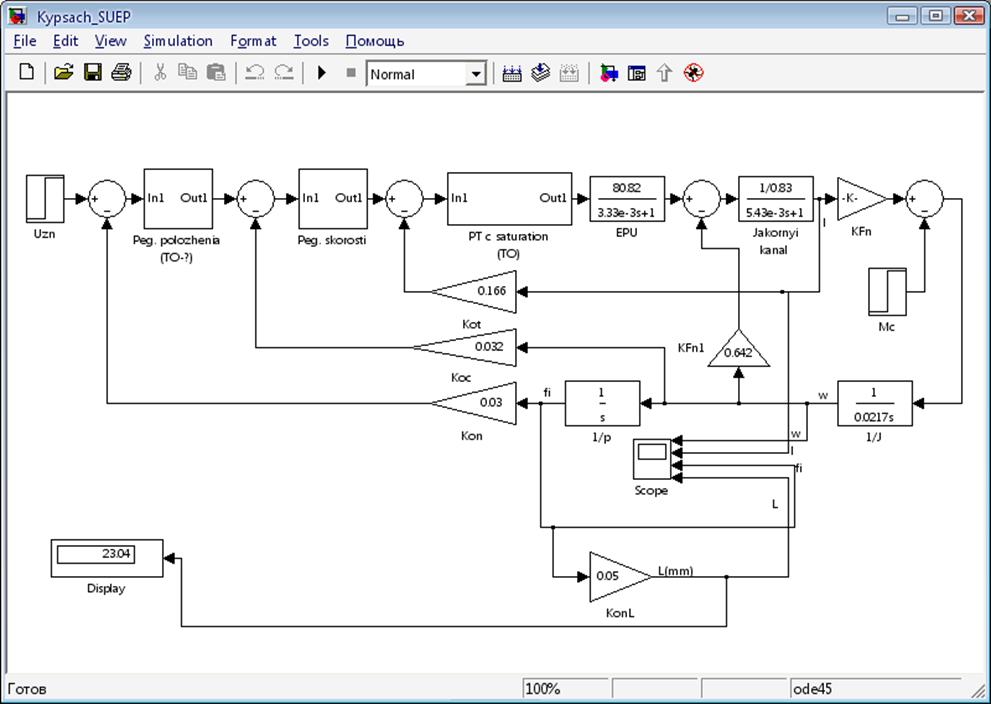
Рис. 11. Структурная схема САУ
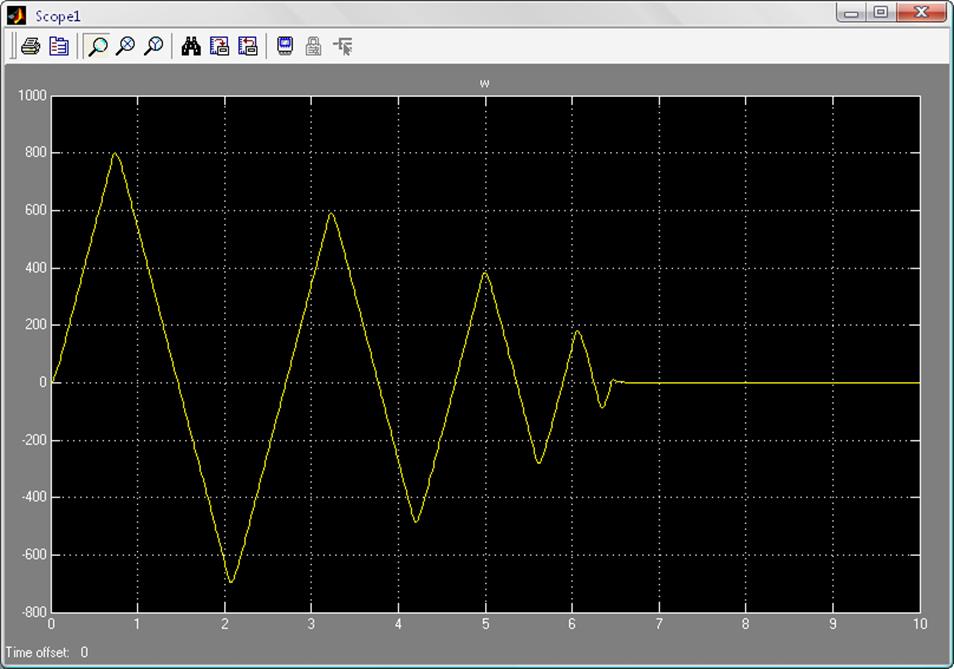
Рис.12. Переходной процесс по скорости.
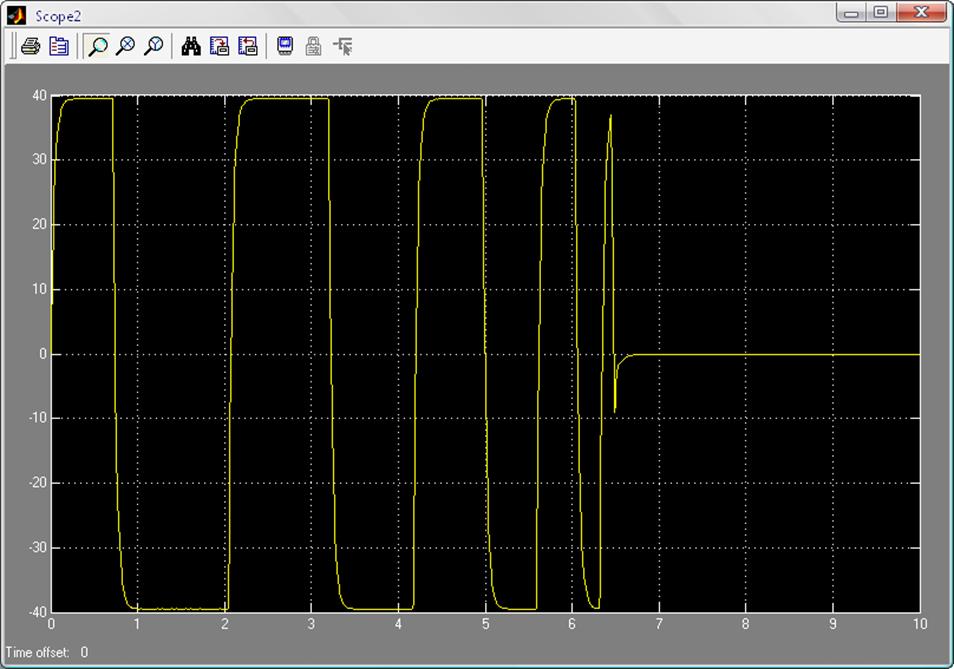
Рис.13. Переходной процесс по току.
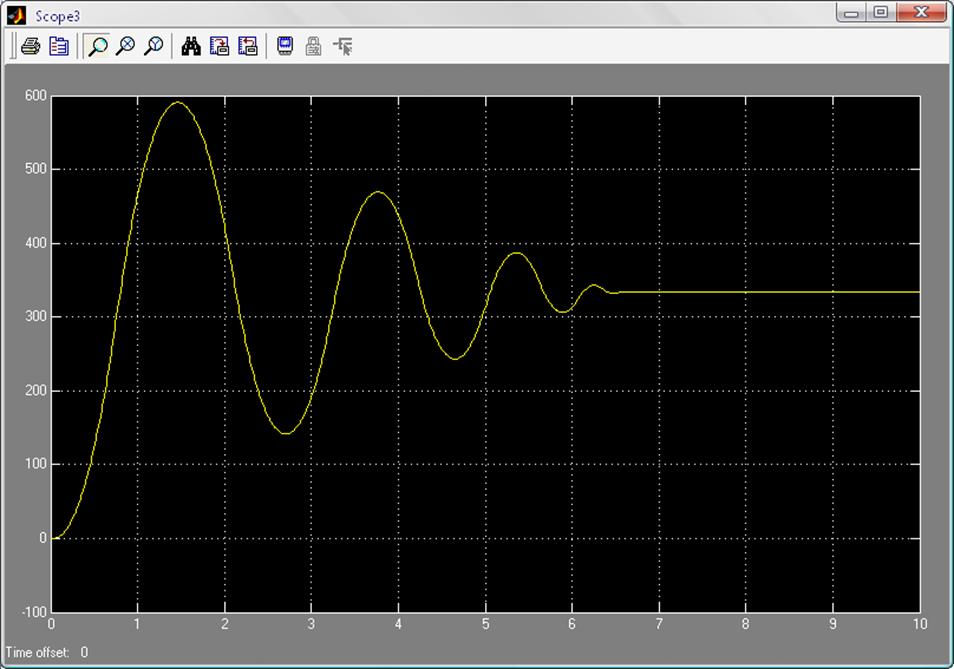
Рис.14. Переходной процесс по
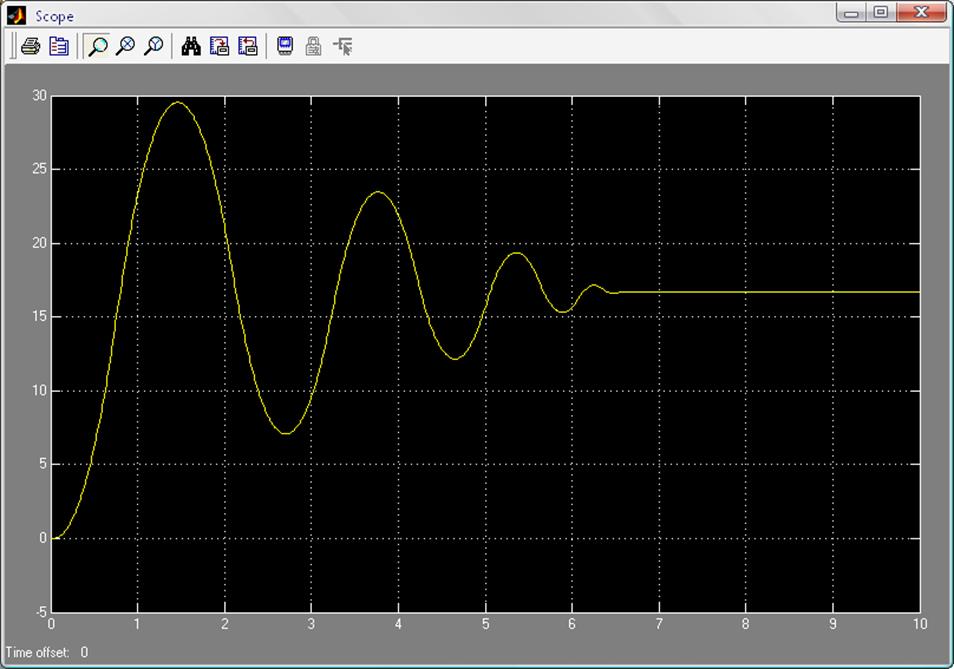
Рис.15. Переходной процесс по
При синтезе системы автоматического управления за основу брали схему электропривода ЭПУ1-2-34-27ПУХЛ4. В качестве системы защит возьмём узел защиты данного электропривода. Узел защит осуществляет ряд защит, которые при срабатывании воздействуют на триггер защиты, выполненный на элементах D2.2 и D2.3 с которого поступает запрещающий сигнал на формирователь импульсов. При срабатывании триггера загорается светодиод V37.
1. Защита от обрыва цепи тахогенератора.
Выполнена на операционном усилителе А4.2. При отсутствии сигнала с тахогенератора на выходе элемента A4.2 будет 0, который поступает на элемент D3.3 (И-НЕ). На выходе D3.3 появится сигнал, воздействующий на триггер защиты. При этом загорается светодиод V47 (“BR”).
2. Защита от перегрева двигателя.
При перегреве двигателя, сопротивление встроенного в него терморезистора R147 уменьшается и на элемент D7.4 (И-НЕ) подается 0. При этом на выходе D7.4 появится сигнал,
устанавливающий триггер, выполненный на D5.1 D5.2 в 0. Сигнал с выхода этого триггера воздействует на триггер защиты. Загорается светодиод V53 ( “T1”)
3. Защита от перегрева преобразователя.
При перегреве преобразователя сопротивление встроенного в него терморезистора R172 уменьшается и на интегратор, выполненный на операционном усилителе A7.2 подаётся положительное напряжение. При этом сигнал с выхода интегратора устанавливает триггер, выполненный на элементах D5.3 D5.4 в 0. Выходной сигнал этого триггера воздействует на триггер защиты. Загорается светодиодV52 (“T2”).
4. Время токовая защита.
При превышении действующим током установленного значения некоторое время на выходе операционного усилителя A4.1 появится сигнал, отпирающий транзистор V45. Тем самым на триггер защиты будет подан сигнал, а также сигнал подаётся на триггер, выполненный на элементах D4.1, D4.2. Выходной синал этого триггера включает светодиод V55 (“Т”). В схеме действует также защита от прегрузки, выполненная на операционных усилителях D9.1, D9.2.
5. Защита от неправильного чередования фаз.
Защита выполнена на логических элементах D6.1, D7.1, D7.2, D7.3. При неправильном чередовании фаз логическая схема выдает сигнал на триггер защиты. При этом загорается светодиод V54 (“ABC”).
6. Защита от исчезновения напряжения.
При снижении напряжения всех или одной из фаз более чем на 5%, сигнал из блока питания воздействует на элемент D1.3 на выходе которого появится сигнал, открывающий транзистор V35. Сигнал с транзистора устанавливает триггер, выполненный на элементах D4.3, D4.4 в 0. Сигнал с этого триггера воздействует на триггер защиты. При этом загорается светодиод V56 (“F”).
7. Максимально токовая защита.
Защита выполнена на транзисторе V32. При превышении допустимого тока транзистор открывается сигналом с датчика тока, воздействуя на триггер защиты
8. Защита от превышения максимальной скорости.
Защита выполнена на транзисторе V23. При превышении скорости на 20% транзистор открывается, воздействуя на триггер защиты, и загорается светодиод V47(“BR”). Сигнал на транзистор подается от тахогенератора через операционный усилитель A2.
9. Защита от снижения скорости ниже минимальной.
Защита выполнена на операционном усилителе A8.1. При снижении скорости ниже допустимой на выходе операционного усилителя появится сигнал, открывающий транзистор V12, который включает реле K2. Реле K2 отключает вход регулятора скорости от цепи управления.
В схеме также предусмотрена блокировка выхода регулятора скорости. Блокировка осуществляется с помощью транзисторов V3, V13. Сигнал блокировки поступает с элементов
D3.1, D3.2 в зависимости от сигналов обратной связи по скорости и управления.
Так как при проектировании САУ за основу брался унифицированный электропривод, то все аппараты управления и защиты берем аналогично техническому описанию электропривода ЭПУ 1.
Для возможности
отключения электропривода от питающего напряжения выбираем вводной
автоматический выключатель, который также служит для защиты электропривода от
тепловых перегрузок и токов короткого замыкания. Согласно условию ![]() выбираем автоматический выключатель
типа А3710Б:
выбираем автоматический выключатель
типа А3710Б:
Номинальный ток выключателя – 80А
Номинальный ток расцепителя – 50А
Уставка тока расцепителя – 400А
Спецификация электропривода спроектированного в данном курсовом проекте аналогична спецификации унифицированного электропривода ЭПУ 1, за исключением элементов спроектированных в данном курсовом проекте. Составим спецификацию на эти элементы.
Заключение
Спроектированная система автоматического управления электроприводом имеет достаточно высокое быстродействие контуров тока и скорости, но из-за блока ограничения процесс пуска затягивается до 1с.
Но преимущество такой
системы в том, что не происходит бросков тока выше ![]() ,
т.е. двигатель не будет перегреваться.
,
т.е. двигатель не будет перегреваться.
Полученное быстродействие, в общем, удовлетворяет приводу подачи. Механическая характеристика привода получилась достаточно жесткая.
Литература
1. Чиликин М. Г., Ключев В. И., Сандлер А.С. «Теория автоматизированного электропривода»- М.: Энергия, 1979.
2. Справочник по электрическим машинам : В 2 т. Под редакцией Копылова И.П. и Копылова Б.К. – М.: Энергоиздат, 1988.
3. Электроприводы унифицированные трехфазные серии ЭПУ 1. / Техническое описание и инструкция по эксплуатации ИГФР. 654674.001 ТО.
4. «Автоматическое регулирование» под редакцией Иващенко Н.Н.-М.: Машиностроение, 1973.
5. Чиликин М.Г., Сандлер А.С. «Общий курс электропривода» - М.: Энергоиздат, 1981.
6. Акинов Н.Н., Ващуков Е.П.: Резисторы, конденсаторы, трансфораторы, дроссели, коммутационные устройства РЭА. Справочник – Мн.: Беларусь, 1994.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.