Граф состоит из элементов произвольной системы, называются вершинами, которые соединяются имеющимися связями в виде отрезков или дуг, которые называются ребра (дуги). Ребра могут быть направленными и ненаправленными. При этом граф называется ориентированным (частично ориентированным, если направлена только часть дуг) или неориентированным. Любая вершина может быть соединена сама с собою. Такая дуга называется петлей. Если ребрам графа соответствуют какие-то числа, тогда граф называется временным. Если ребра имеют цветовую маркировку, то граф называется раскрашенным. В ряде случаев в графах удобно поменять местами ребра и узлы. При этом если элементам системы соответствуют вершины графа, то он называется вершинным. Если элементам системы соответствуют ребра – реберным.
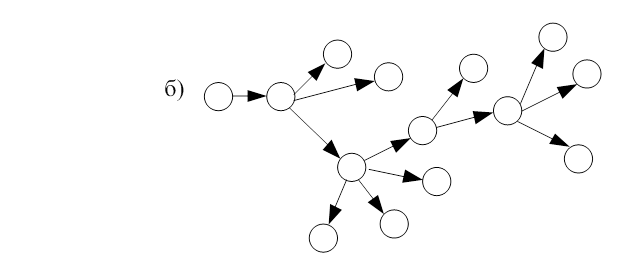
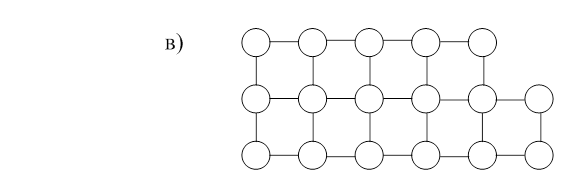
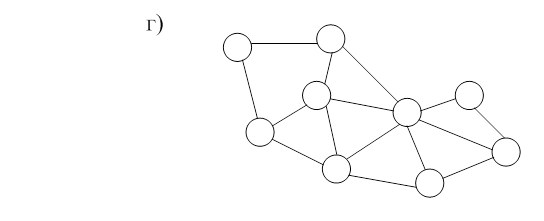
В графах, моделирующих организационные структуры довольно часто встречаются такие характерные разновидности, как линейная древовидная и матричная структура рис. 3 (а, б, в). В технических системах чаще встречаются линейная и сетевая структуры рис. 3 (а, г).

Подводя итог вышесказанному можно дать более развернутое определение понятию системы.
Система – это совокупность взаимосвязанных элементов обособленная от среды и взаимодействующая с ней как единое целое.
Лекция 5
Динамические модели системы
Рассмотренные модели не предусматривали их изменение во времени, поэтому их можно называть статическими. Если же в системе происходят какие-то изменения с течением времени, которые отображаются моделью, то это динамическая модель. Динамическая модель подобна статической по степени структурированности разделяется на модель «черного ящика», структуры и состава. При этом динамическая модель «черного ящика» в качестве входа и выхода имеет описание начального и конечного состояний системы.
Динамическая модель состава системы в общем случае содержит операторы, принимаемые системой для перехода из состояния в состояние ( например, компьютерная программа также является системой), любой алгоритм может быть рассмотрен с использованием 3х операторов:
· выполнять последовательно
· если то, то…
· выполнять, пока не выполнится условие
Динамический вариант модели структуры системы содержит описание взаимосвязей между операторами, т.е. описание, протекающее в системе процессов.
При рассмотрении динамических моделей различают 2 вида динамики:
· функционирование (те процессы, которые протекают в системе или между системой и средой и связаны с выполнением основной цели системы).
· развитие (то, что происходит с системой при изменении ее целей).
Искусственные и естественные системы
Поскольку помимо искусственных систем существуют естественные, у которых нет цели существования, их можно рассматривать не как системы, а как объекты, подвергаемые структурированию, а значит моделированию по принципу искусственных систем.
Поскольку естественные также имеют множество входов и выходов структурных элементов и внутренних взаимосвязей. При этом функционирование естественных систем не имеет смысла, только если рассматривать эту систему оторвано от окружающей среды. Если рассмотреть любую естественную систему как подсистему более крупной системы, то у этой подсистемы обнаруживаются функции, которыми пользуются другие подсистемы. У каждой системы есть цель (назначение, основная функция), однако если у некоторого объекта цель неизвестна, это не делает ее не системой.
Субъективные и объективные цели
Цель искусственной системы определить идеальный образ желаемого результата ее функционирования. Такой идеальный образ будущего состояния системы и окружающей среды называется субъективной целью.
Фактически после выполнения системой своих действий получается тот или иной результат. Он может совпадать или не совпадать с субъективной цельно, но главное то, что он реально существует. Этот результат по отношению к моменту начала действия системы называется объективной целью. Принято считать, что у естественных неодушевленных систем объективные цели и только.
Классификация систем
Начиная сравнивать и различать систему, считать некоторые из них сходными, а некоторые различными, тем самым вводим и осуществляем их классификацию.
Поскольку классификация – это только модель реальности, она никогда не будет идеально отвечать точкам реальности.
Чем более подробная классификация строится, тем сложнее сделать ее исчерпывающей.
Всегда остается недоработанный участок реальности, помеченный в классификации позиции и др. именно поэтому различные классификации могут оставаться незаконченными из-за недостаточного развития наших знаний по данному вопросу. Например, таблица Менделеева.
Классификации систем:
- по происхождению;
- по типу переменных;
- по типу операторов;
- по способу управления;
- по обеспеченности ресурсами.
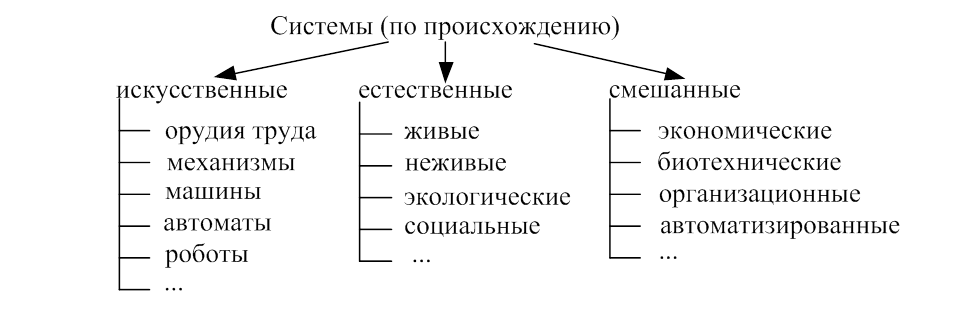
Классифицируя системы по происхождению в один уровень классификации очевидно выделить системы искусственные и естественные. Также существуют комбинации этих систем, которые называются смешанными.
Эргономические – человек + лопата.
Биотехнические – организм + имплант.
Организационный – сообщество + машины, механизмы.
Эти классификации не окончены, поскольку в искусственных системах, например, незавершенно создание искусственного интеллекта. Развития естественной системы может получить подтверждение теорема Вернадского « О наносфере».
В системах различают 3 вида переменных: множество входящих переменных - х, множество выходных - y и множество внутренних – z. По форме математического описания этих переменных системы принято делить следующим образом.
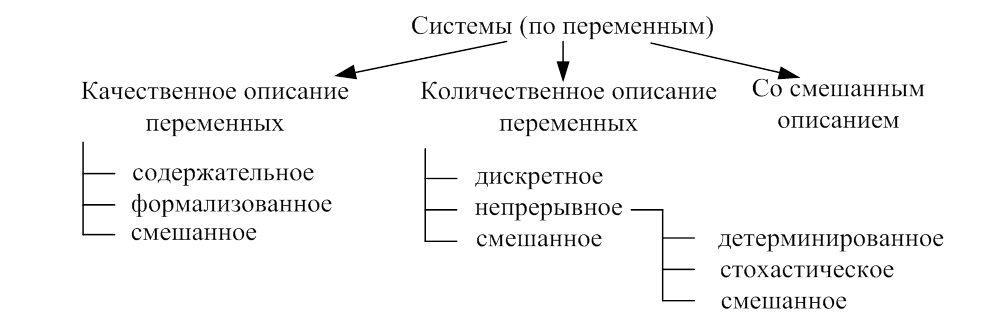
Переменные могут быть описаны качественно, количественно или смешанным образом. Качественное описание переменных может быть выполнено с помощью естественного языка (содержательное описание) или с помощью искусственного языка, позволяющего более глубокую формализацию.
При количественном описании элементов они могут быть описаны методами дискретной или непрерывной математики. Непрерывная математика имеет собственные виды переменных, они разделены на детерминированные и стахостические.
Описание системы определяется ее оператором S, т.е. основным уравнением системы.
Лекция 6
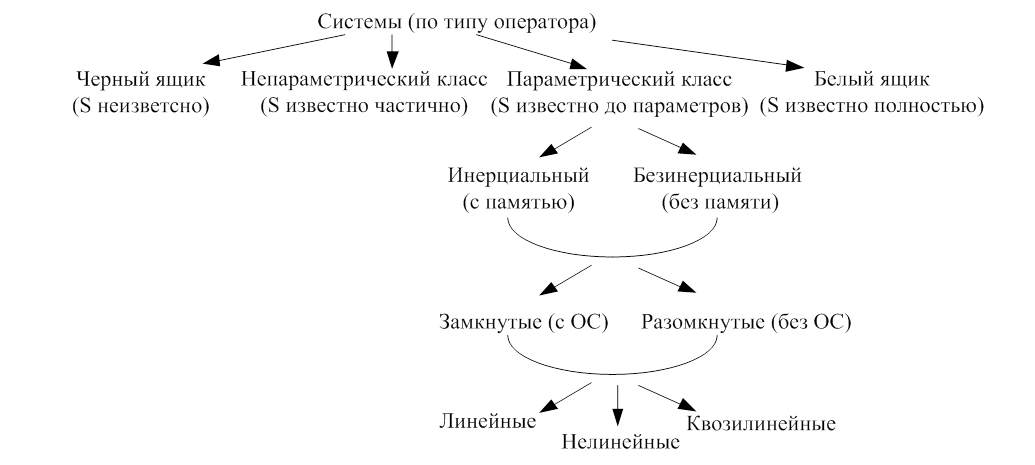
S представляет собой функцию преобразования системы, он определяет связь между входями и выходами этой системы. Объем и форма этой информации позволяет классифицировать системы следующим образом (на 4 большие группы).
1. если оператор неизвестен совершенно, то система представляет собой «черный ящик». При этом дальнейшее развитие классификации систем в этой ветви заканчивается.
2. если об операторе известна только самая общая информация (дискретен или непрерывен, линеен или не линеен), но нет информации о параметрах оператора, такая система может называться непараметризованными. Дальнейшая классификация таких систем может быть очень широкой (поэтому на иллюстрации ее нет) и определяется видом об операторе S.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.