![]() У реального доплеровского измерителя луч антенны измеряет конечную
ширину как в : вертикальной, так и в горизонтальной плоскостях, поэтому на местности
облучается не одна i-я точка, а целый участок S. Результирующий отраженный от участка S сигнал представляет собой спектр
частот, каждой из составляющих которого соответствует своя доплеровская
частота. Положение этого спектра на оси частот по отношению к частоте излучаемых колебаний характеризуется
средней доплеровской частотой Fgcp:
У реального доплеровского измерителя луч антенны измеряет конечную
ширину как в : вертикальной, так и в горизонтальной плоскостях, поэтому на местности
облучается не одна i-я точка, а целый участок S. Результирующий отраженный от участка S сигнал представляет собой спектр
частот, каждой из составляющих которого соответствует своя доплеровская
частота. Положение этого спектра на оси частот по отношению к частоте излучаемых колебаний характеризуется
средней доплеровской частотой Fgcp:
![]()
где λ, В, Г- углы, характеризующие положения луча антенны по отношению к направлению вектора путевой скорости W.
Для определения путевой скорости и угла сноса на борту самолета может быть использована трехлучевая антенная система. При угле сноса, равному нулю по усредненному значению двух доплеровских частот Fg1 и Fg2
![]()
путевая скорость определяется формулой
W=(Fg1+Fg2)K,
где К-коэффициент пропорциональности.
При угле сноса, отличном от нуля, и, следовательно, несимметричном положении площадок 1,2 и 3 по отношению к линии пути самолета Fg1, Fg2, Fg3 не будут равны друг другу; УС и W определяют по следующим формулам:

где Kl и К2 -коэффициенты пропорциональности.
4. Описание прототипа.
В качестве прототипа берем Доплеровский измеритель скорости и сноса ДИИС-013
Доплеровский измеритель скорости и сноса ДИИС - 013 относится к классу ДИСС с частотной модуляцией зондирующего сигнала.
Принцип действия ДИСС.
Принцип действия ДИСС с частотно - модулированным зондирующим сигналом (ДИСС ЧМ) основан на выделении доплеровского сдвига одной из гармоник (обычно третьей) частоты модуляции Fм отраженного сигнала. При ЧМ спектр преобразованного прямого сигнала сосредоточен, в основном, на низких частотах, как и в ДИСС ИМ. Это -следствие малой задержки прямого сигнала по сравнению с сигналом передатчика (10-2 ... 10-3), при которой разностная частота (т. е. частота преобразованного сигнала) лежит в области нулевых частот. В районе частоты 3Fм уровень прямого сигнала на 25 ... 30 дБ ниже, чем на частоте Fд(выделяемой в ДИСС НМ), что позволяет снизить требования к коэффициенту развязки также примерно на 25 дБ.
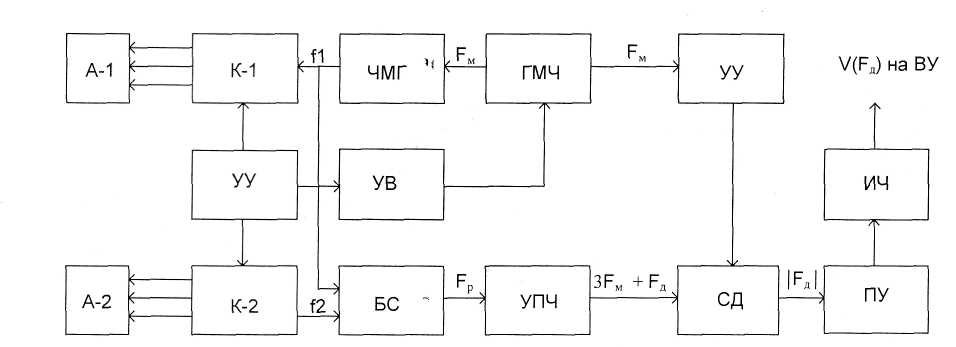
Рис.4.1. Структурная схема ДИСС ЧМ
А-1- передающая антенна; А-2- приемная антенна;К-1 ,К-2- коммутаторы; УУ- устройство управления; ГМЧ- генератор модулирующих частот; ЧМГ-частотно-модулированный генератор; БС- балансный смеситель; УПЧ-усилитель промежуточной частоты; СД- синхронный детектор; ПУ-полосовой усилитель; ИЧ- измеритель частоты; ВУ- вычислительное устройство.
Передатчик ДИСС ЧМ содержит частотно - модулированный генератор ЧМГ, который с помощью коммутатора К - 1 подключается поочередно к входам передающей антенны А-1, соответствующим трем лучам
ДИСС. Модулирующее напряжение подается с генератора модулирующих частот ГМЧ.
Принятые антенной А-2 отраженные сигналы, задержанные относительно зондирующего сигнала на 10 ... 100 мкс (в зависимости от высоты полета), коммутатором К -2 подключаются к балансному смесителю БС. Устройство управления УУ синхронизирует коммутаторы ДИСС. Усилитель УПЧ выделяет из преобразованного сигнала полосу частот вблизи частоты 3Fм. Выделенный сигнал, имеющий балансную модуляцию частотой Fд (в спектре которого отсутствует частота 3Fм), поступает на синхронный детектор СД. На второй вход СД подается гетеродинирующий сигнал с частотой 3Fм с умножителя частоты УЧ.
На входе СД выделяется сигнал /Fд/ который через полосовой усилитель ПУ направляется на измеритель частоты ИЧ, а затем на вычислительное устройство ВУ.
Применение периодической ЧМ приводит к периодическому пропаданию полезного преобразованного сигнала при изменении высоты полета. Высоты, на которых мощность полезного сигнала частоты 3FM равна нулю, называется слепыми. Так, например, при задержке отраженного сигнала относительно зондирующего на время t3 = кТм, где Тм - период ЧМ, а k = 1, 2, 3, разностная частота преобразованного сигнала Fp =| f1- f 2| равна доплеровской частоте. Слепые высоты при работе на частоте 3Fм наблюдаются на высотах Нсл = k(0,5cTм/3)sinBo и соответствуют при Fм = 1 МГц и Во = 65° высотам к 45,3 м, где к =1,2, З. Для борьбы с этим недостатком в ДИСС ЧМ используют изменение (вобуляцию) частоты модуляции, а также применяют изочастотные антенны с широкой ДН, следы лучей которой на земной поверхности расположены на изочастотных линиях. В каждом из лучей одновременно принимают сигналы с разными t3i, и если одному из этих t3i соответствует слепая высота, то при других t3i в пределах данного луча условие t3i = кТм не выполняется и возможен прием сигнала. Так как след ДН располагается вдоль изочастотной линии, то расширения спектра не наблюдается и точность ДИСС не снижается. Однако при этом требуется стабилизация антенны по вектору скорости Vr с тем, чтобы сохранить постоянство угла γ при изменении вектора Vr. Достоинством ДИСС ЧМ является уменьшение на 25 ... 30 дБ по сравнению с ДИСС НМ требований к коэффициенту развязки. К числу основных недостатков относится,) худшее (6 дБ) использование мощности передатчика (по сравнению с ДИСС НМ) из-за выделения из спектра преобразованного сигнала только составляющих 3Fм ± Fди наличие слепых высот.
б) Состав ДИСС 0-13.
В состав ДИСС - 013 входят высокочастотный и низкочастотный блоки и индикатор. Высокочастотный блок конструктивно объединяет антенную систему, передатчик (с высоковольтным источником питания) и приемник. Низкочастотный блок содержит устройства слежения и управления и вычислитель. На индикаторе отображаются путевая скорость и угол сноса ВС. В навигационный комплекс или навигационное вычислительное устройство для счисления пути с ДИСС выдаются импульсные сигналы, частоты следования которых соответствуют доплеровским частотам по лучам ДН антенны. Кроме того, в сопряженные с ДИСС системы выдаются сигналы "Память" и "Море", вырабатываемые соответственно при малом уровне принимаемого сигнала (хотя бы по одному лучу ДН) и при вводе коррекции при полете над морской поверхностью.
в) Эксплуатационно-технические характеристики.
Диапазон измеряемых путевых скоростей, км/ч ......................................................................................................... 180-1300
То же углов сноса, угловые градусы ......................................................................................................... ± 30
Рабочий диапазон высот, м......................................................................................................... 10-15 000
Погрешность измерения путевых скоростей (2ν), %:
по импульсному выходу ......................................................................................................... 0,25
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.