2.16. Масса весопроцессора не более:
- без аккумуляторов 0,4 кг;
- с аккумуляторами 0,59 кг.
3. КОМПЛЕКТНОСТЬ
3..1. Комплект поставки весов приведен в табл. 2.
Таблица 2
|
Обозначение |
Наименование |
Количество, шт., для ВТА- |
||
|
10/2П |
10/4П |
10/6П |
||
|
ПУЛЬСАР 2.791.043.00-01 |
Платформа грузо-приемная ПТ-09 |
2 |
4 |
6 |
|
ПУЛЬСАР 2.796.013.00.000 -04 |
Процессор измери-тельный ПИ-4Р4/1 № |
2 |
4 |
6 |
|
ПУЛЬСАР 4.860.025-06 |
Кабель соедини-тельный |
1 |
2 |
3 |
|
ПУЛЬСАР 4.860.025-07 |
Кабель соедини-тельный |
- |
1 |
2 |
|
ПУЛЬСАР 4.860.020 |
Кабель соедини-тельный |
1 |
1 |
1 |
|
ПУЛЬСАР 4.860.030 |
Кабель сетевой |
1 |
1 |
1 |
|
ПУЛЬСАР 2.796.005.00.000 |
Весопроцессор ВП-91 |
1 |
1 |
1 |
|
Аккумулятор 95AAS* |
8 |
8 |
8 |
|
|
Устройство заряд-ное ЗУ-8 |
1 |
1 |
1 |
|
|
Адаптер питания АП-18** |
1 |
1 |
1 |
|
|
Вставка плавкая ВП1-2А, 36В |
1 |
1 |
1 |
|
|
ПУЛЬСАР 2.791.048РЭ |
Руководство по эксплуатации |
1 |
1 |
1 |
* возможно использование других аналогичных никель-кадмиевых акку-муляторов промышленной серии напряжением 1,2 В, емкостью не менее 0,95 Ач;
** возможно использование другого аналогичного адаптера ~220/18 В с выходным током не менее 0,4 А.
4. УСТРОЙСТВО И РАБОТА ВЕСОВ
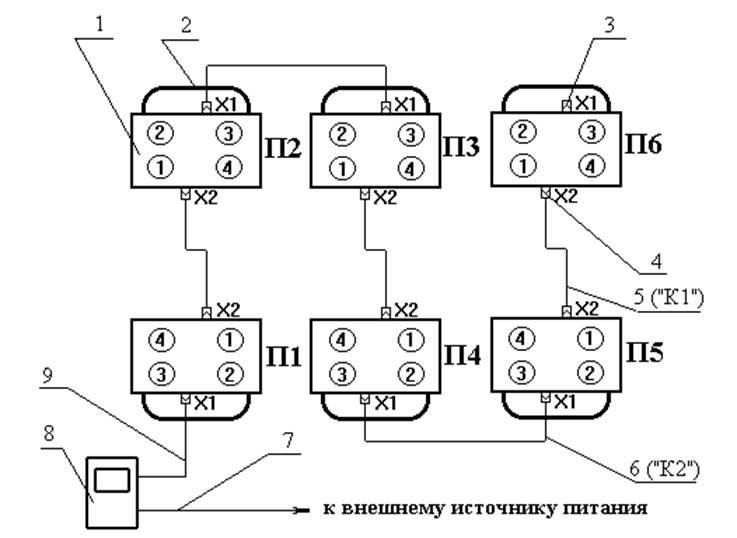
4.1. Весы состоят из двух, четырех или шести переносных грузоприемных платформ 1 (в дальнейшем - ГП), на которые устанав-ливаются колеса
взвешиваемого автомобиля. Все платформы соединяются между собой кабелями 5, 6 (см.
рис.1), а платформа № 1 соединяется кабелем с весопроцессором, на дисплей
которого выводятся результаты взвешивания. Питание весов осуществляется от
бортовой сети автомобиля или встроенного аккумулятора. При наличии сети
переменного тока напряжением 220 В, 50 Гц возможно питание весов от адаптера питания,
который входит в комплект поставки весов.
Рис.1
1-грузоприемная платформа; 2 - ручка для переноски; 3, 4 – соеди-нители; 5, 6 - кабели соединительные; 7 – кабель сетевой; 8 – весопроцессор;
9 - кабель центральный.
В окружностях проставлены условные позиции датчиков.
4.2. Платформа
4.2.1. Грузоприемная платформа (см. рис.2) прямоугольной формы представляет собой тонкостенную седловидную металлическую конст-рукцию с двумя пандусами для наезда на платформу. Платформа через сферические вставки (4) опирается на два тензометрических силоизме-рительных датчика (1) и (2), закрепленных на опорных башмаках (9). Силоизмерительные датчики соединены кабелями (7) с измерительным процессором (6) , установленным в ГП.
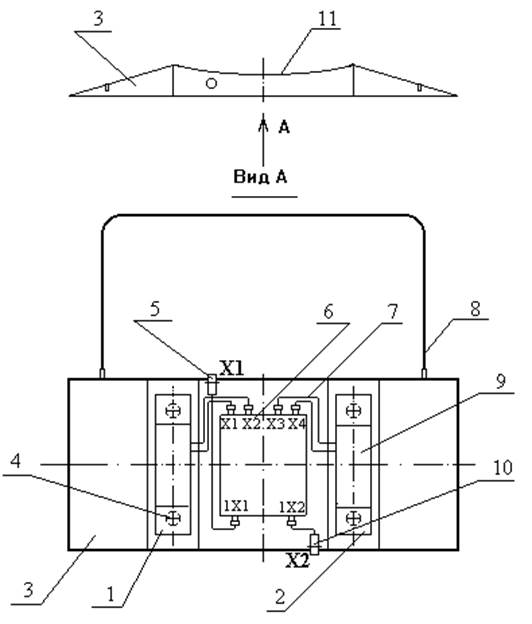 |
Рис.2
1, 2 - тензорезисторный силоизмерительный датчик; 3- грузопри-емная платформа; 4 – сферическая вставка; 5, 10 – соединители платфор-мы; 6 – измерительный процессор; 7 – соединительные кабели датчиков; 8 - ручка; 9 – опорный башмак; 11 – грузоприемное «седло» платформы.
Каждый датчик имеет два независимых тензометрических преобразователя силы, чувствительные элементы которых разнесены пространственно, что обеспечивает четыре канала измерения нагрузки (по два от каждого датчика) на каждой платформе весов. Ручка (8) служит для переноски платформы и установки ее на месте взвешивания. Платформа снабжена двумя соединителями (5) и (10) для подключения кабелей связи к другим платформам весов. На рис.2 ручка показана в положении взвешивания. Для переноски ручка поворачивается, укладывается поверх платформы и фиксируется защелкой за край платформы.
4.3. Измерительный процессор
4.3.1. Измерительный процессор представляет собой одноплатную конструкцию, заключенную в металлический корпус прямоугольной формы.
4.3.2. На боковых стенках корпуса измерительного процессора размещены гермовводы для кабелей, связывающих его с силоизмери-тельными датчиками платформы и с соединителями для внешних под-ключений платформ. Кабели подключены к соединителям, смонтированным на плате измерительного процессора.
4.3.3. Измерительный процессор поочередно в порядке возрастания условных позиций датчиков, показанных на рис.1 в окружностях, коммутирует измерительные цепи датчиков, преобразует их сигналы, пропорциональные нагрузке, в цифровую форму и по интерфейсу RS 485 передает информацию в весопроцессор.
Измерительный процессор имеет встроенный датчик температуры для измерения температуры в зоне размещения платформы, сигнал которого используется для коррекции температурной погрешности силоизме-рительных датчиков платформ.
4.4. Весопроцессор
4.4.1. Весопроцессор (см. рис.3) представляет собой компактную конструкцию, заключенную в пластмассовый корпус типа ручного пульта. На корпусе в нижней части установлены две стойки для крепления ремня для варианта подвески весопроцессора на шее оператора.
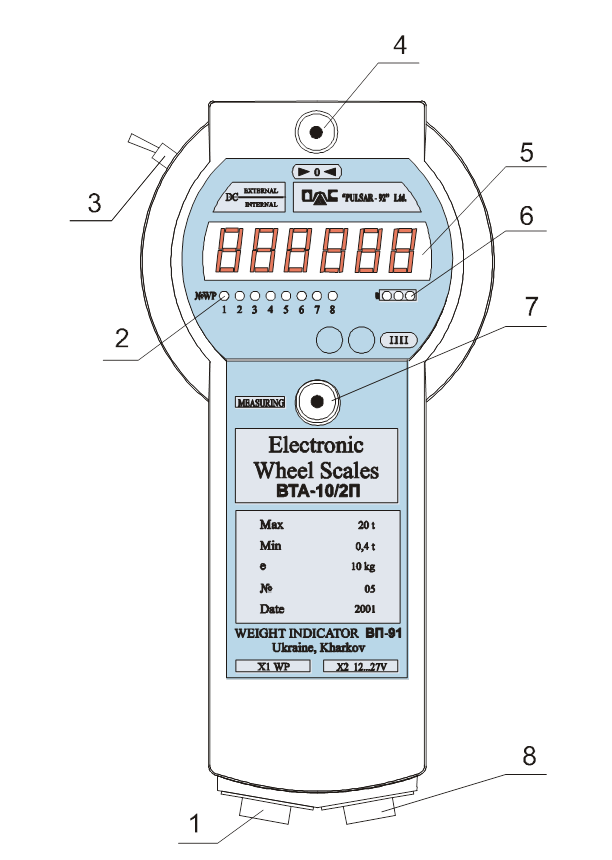
Рис.3
1 - розетка соединителя Х1 ГУ; 2 – индикаторы контроля работающих ИП;
3 – тумблер переключения режима питания; 4 – кнопка обнуления весов;
5 – цифровой индикатор; 6 – индикаторы контроля встроенного аккумуля-тора; 7 – кнопка ИЗМЕРЕНИЕ; 8 – вилка соединителя Х2 12-27 В.
4.4.2. На лицевой панели корпуса весопроцессора размещены:
- цифровой индикатор, на котором высвечиваются результаты взвешивания и сообщения о результатах тестирования (коды отказов);
- линейка из 8 светодиодных индикаторов контроля работающих грузоприемных платформ (измерительных процессоров ИП).
- 3 светодиодных индикатора контроля напряжения Ua встроенного аккумулятора: - свечение 3-х светодиодов 10,4 В £ Ua,
- свечение 2-х светодиодов 9,6 В £ Ua < 10,4 В,
- свечение 1-го светодиода 8,8 В £ Ua < 9,6 В,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.