






















Функциональная схемацифрового измерителя углового перемещения состоит из:
2.1Блок питания – это опорный источник питания. Он обеспечивает
напряжение питания для микросхем ![]() 15 В. Блок питания
состоит из выпрямителя на основе диодного моста, сглаживающего фильтра,
стабилизатора и трансформатора.
15 В. Блок питания
состоит из выпрямителя на основе диодного моста, сглаживающего фильтра,
стабилизатора и трансформатора.
· трансформатор – преобразует большое значение переменного напряжения в малое переменное напряжение.
· диодный выпрямительный мост - он используется для преобразования переменного напряжения поступающего с трансформатора питающей сети в постоянное;
· сглаживающие фильтры, которые включаются между диодным мостом и стабилизатором для уменьшения пульсаций (переменной составляющей) выпрямленного напряжения. Фильтр, сглаживающий низкие частоты, электролитического типа ЭМ-М (тип диода выбирался в соответствии с номинальным рабочим напряжением и диапазоном рабочих температур), фильтр, сглаживающий высокие частоты, полярного типа КСО-1.
· невысокая стабильность напряжения в сети обуславливает применение стабилизации выходного напряжения выпрямителя. Для получения стабильного по величине постоянного напряжения между выпрямителем и дальнейшей схемой включается стабилизатор напряжения (интегральный стабилизатор К142ЕН8В на 15 В).
2.2 Блок преобразования постоянного напряжения в меандр. Используется для преобразования постоянного стабилизированного напряжения в напряжение, которое имеет форму меандра, чтобы устранить возникновение контактных ЭДС (для мостовой схемы в узловых точках, где соединяются различные проводники, при воздействии температуры возникают термоэлектрические напряжения – термоЭДС). Это приводит к самопроизвольному изменению напряжения на выходе мостовой схемы, не зависящему от изменения измеряемого перемещения. Состоит из: интегрального стабилизатора, усилительного каскада, ключевой микросхемы, мультивибратора, триггера.
· интегральный стабилизатор на 6 В, он представляет собой систему регулирования, в которой с заданной точностью поддерживается постоянным напряжение на выходе независимо от изменения входного напряжения и тока нагрузки. Он используется для задания амплитуды напряжения для мостовой схемы (эта величина будет в дальнейшем рассчитана);
· усилительный каскад состоит из 4-х усилителей (2-х операционных и 2-х на биполярных транзисторах);
· ключевая микросхема управляется сигналом триггера;
· мультивибратор – генератор прямоугольных импульсов. Он задает период изменения напряжения из положительного в отрицательное. Частота должна лежать в пределах 5 кГц до 20 МГц, если она меньше этого диапазона, то будет происходить сильная дискретизация сигнала, если меньше – будет происходить влияние высокой частоты на распределенные параметры цепи;
· триггер, т.к. мультивибратор имеет не идеальную характеристику преобразования, поэтому после него ставится триггер, который делит частоту следования импульсов мультивибратора на 2, в итоге получаем сигнал со скважностью равной 2;
2.3 Блок датчика преобразует приложенное угловое перемещение в электрический сигнал, пропорциональный угловому перемещению. Информация заложена в изменении амплитуды выходного сигнала. Блок датчика состоит из: индуктивного датчика, который включен в мостовую схему.
2.4 Блок вторичного измерительного преобразователя состоит из:
· стабилитронной защиты, которая служит для защиты входных каскадов усилителя от случайных повышений напряжений на выходе моста, из-за которых могут сгореть входные каскады ВИПа.
· мультиплексора, который необходим для калибровки мостовой схемы. Использован для передачи сигналов с образцового откалиброванного моста и измерительного моста. Т. е. посредством данного коммутатора будет проводиться калибровка моста.
· усилительного каскада, который используется для масштабного преобразования измеряемого сигнала до уровня, установленного в техническом задании.
· Ключевая микросхема, которая управляет логическими элементами в блоке преобразования постоянного напряжения в меандр.
· Амплитудный детектор– это амплитудный выпрямитель, который предназначен для преобразования переменного напряжения в постоянное стабильное напряжение одного знака;
· Фильтра – применяется для сглаживания пульсаций после преобразования меандра в постоянное напряжение.
2.5 Датчик температуры – подает цифровой сигнал на микропроцессор о температуре окружающей среды, согласно которому, микропроцессор выбирает поправку для результата измерения из таблицы, которая составлена по экспериментальным исследованиям датчика.
2.6 АЦП - применяется для согласования аналогового источника измерительного сигнала с цифровым устройством обработки и представления результатов измерения; в данном курсовом проекте это микропроцессор;
2.7 Микропроцессор – для обработки результатов измерений, компенсации температурной погрешности, линеаризации функции преобразования.
2.8 ОЗУ – оперативно – запоминающее устройство предназначенное для хранения временной информации поступающей с микропроцессора.
2.9 Супервизор – предназначен для отслеживания сбоев в программе выполняемой микропроцессором, и если сбой произошёл, то супервизор перезапускает микропроцессор.
2.10 Интерфейс – предназначен для согласования сигналов между блоками схемы.
2.11Клавиатура – предназначена для внешний связи оператора с прибором при выполнении измерений.
2.12 4-х разрядный индикатор - применяется для отображения результата измерения.
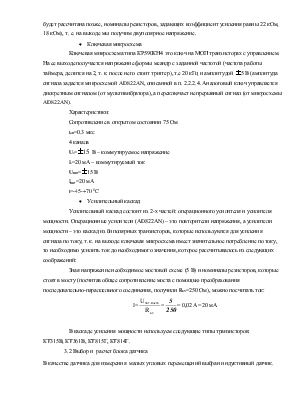
Глава 3 Анализ электрической принципиальной схемы прибора
3.1 Выбор и расчет преобразования постоянного напряжения в меандр.
· Расчет мультивибратора
В современной цифровой аппаратуре очень часто используются генераторы тактовых импульсов со скважностью 50 %, часто называемые генераторами меандра. Такие генераторы удобно строить на таймерах в режиме мультивибратора [2].
В связи с тем, что времязадающая цепь управляется выходным напряжением таймера, между выводом 3 и источником питания включен резистор Rн , позволяющий увеличить размах выходного напряжения почти до Uп. Высокая точность при формировании меандра получается благодаря тому, что заряд и разряд конденсатора Сt осуществляются через резистор Rt. На точность влияют стабильность высокого и низкого уровней выходного напряжения и их симметричность относительно пороговых напряжений Uп/3 и 2Uп/3. При рекомендуемом Rн=1 кОм сопротивление резистора необходимо выбрать из условия (15)
Rt>> Rн, (15)
т.е. Rt>10 кОм. Частота выходного сигнала рассчитываем по формуле (16)
fм= (16)
(16)
Частота должна лежать в пределах 5 кГц до 20 МГц, если она меньше этого диапазона, то будет происходить сильная дискретизация сигнала, если меньше – будет происходить влияние высокой частоты на распределенные параметры цепи.
Частоту сигнала меандра выберем из предложенного диапазона, fм=40 кГц. Рассчитаем параметры RC-цепи пользуясь формулами (15), (16):
Из параметрического ряда для резисторов, учитывая (15) выберем Rt.
Rt=100 кОм, следовательно, Ct можно выразить следующей формулой:
Ct= =
= =1.18*10-10 Ф=118 пФ
=1.18*10-10 Ф=118 пФ
По параметрическому ряду[1] для конденсаторов уточняем номинал конденсатора Ct=100 пФ.
Характеристики таймера:
Uпит=5-15 В
Iпит=15 мА
Uoi=2.5 – выходное напряжение низкого уровня
Uoн=2.5 – выходное напряжение высокого уровня
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.