Для ПИД-регулирования объектом управления используется т.н.импульсное управление, когда продолжительность включения двигателя зависит от величины отклонения регулируемого параметра, а направление вращения- от знака отклонения. В основу метода релизации положен алгоритм широтно-импульсной модуляции, выполняемый «Блоком бейсик-сценария».
Принцип работы заключается в следующем. На блок «ПИД регулятора» подается сигнал от объекта и значение уставки. Этот блок вырабатывает аналоговое управляющее воздействие, которое поступает в «Блок бейсик-сценария». А в блоке сценария в зависимости от величины абсолютной величины (модуля) аналогового сигнала вырабатывается дискретный сигнал (длительность его прямопропорциональна величине модуля), который подается на один из двух управляющих дискретных выходов. Выход, на который подается дискретный сигнал определяется значением знака аналогового сигнала.
На рисунке 56 изображен редактор задач импульсного регулятора. С «Блоков ТЭГ» «SPIN1” и “SPIN6”, связанных с движковыми регуляторами формы отображения (рисунок 57), на блок “ПИД-регулятора” поступают сигнал уставки и сигнал, эмулирующий обратную связь объекта управления. Управляющее воздействие с ПИД-регулятора передается в “Блок бейсик сценария” (SCR3), где по таймеру формируется пилообразный сигнал, максимальное значение и период которого указываются в программном коде в виде констант. Значение пилообразного сигнала сравнивается с абсолютным значением управляющего аналогового сигнала на выходе блока PID1 и если второй больше первого, то "Блок бейсик-сценария" формирует на своих выходах дискретные сигналы.
В редакторе задач один из них умножается на минус единицу, для отчетливого их разделения на графике формы отображения.
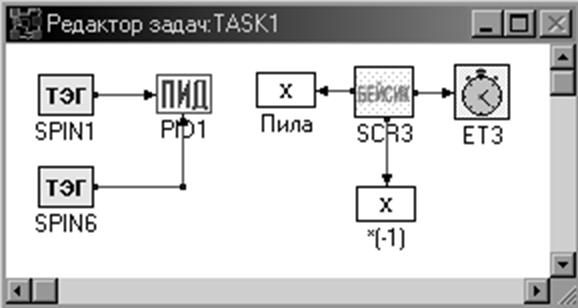
Рисунок 56 - Окно редактора задач импульсного регулятора
На рисунке 57 приведена форма отображения, на которой расположены движковые регуляторы уставки и иммитатора ввода сигнала от объекта ..
На графике (рисунок 57) показаны управляющие импульсы двух дискретных каналов, причем сигналы разных выходов противоположны по знаку.
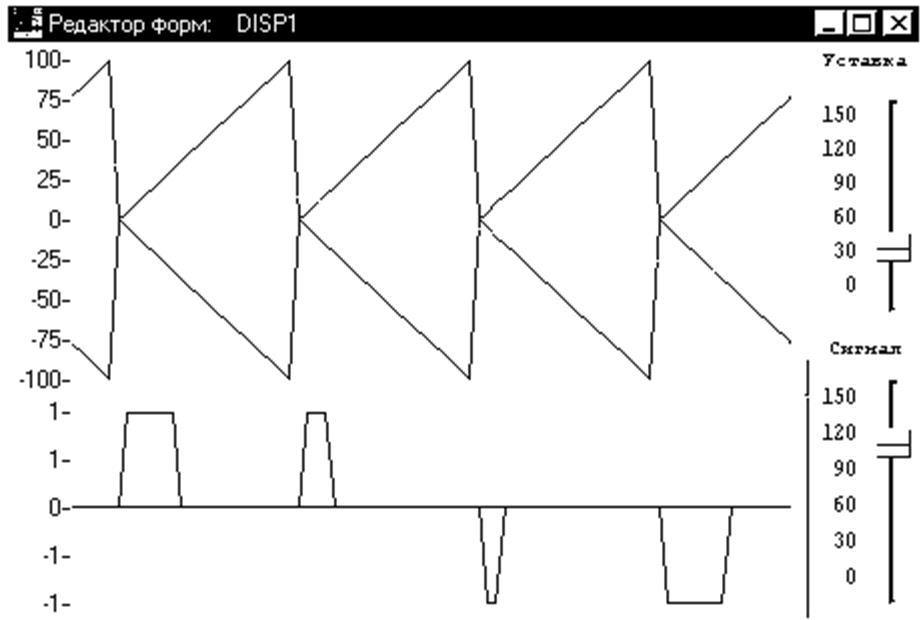
Рисунок 57 - Форма отображения ШИМ
Текст “Блока бейсик-сценария” ШИМ:
Sub SCR3()
'----------------------- Константы -------------------
const Tik = 20
' Период пилообразного сигнала ( в 0,1 сек )
const Max = 100
' Наибольшее значение вых.сигнала ( в 0,1 сек )
'--------------------- Переменные -------------------
dim Timer3 as Tag
dim Pila as Tag
dim Q as Tag
dim DiscretOut as Integer
dim NumberOut as Integer
dim Pid as Tag
'-------------------Получение тэгов -----------------
set Timer3 = GetTag ("TASK1", "ET3")
' Значение таймера
set Pid3 = GetTag ("TASK1", "PID1")
' Выходной сигнал
set Pila = GetTag ("VIRTASK", "PILATAG")
' Значение пилообразного сигнала
set Q = GetTag ("VIRTASK", "QTAG")
' Значение скважности
'-----------------------Программа -------------------
if Timer3 >= (Tik - 1) then
' Если закончился период пилы, то...
outputi 0,1
' ...сброс таймера
Pila = 0
' ...обнуление значения пилы
Q = 0
' ...обнуление скважности
else
' Иначе...
outputi 0,0
' ...таймер продолжает счет
if Pila < Abs (Pid3) then
' Если вых. сигнал > пилы, то
DiscretOut = 1
' на управляющий выход единицу и
Q = Q + 1
' подсчет длительности управ. сигнала
if Abs (Pid3) >= Max then
' Если вых.сигнал MAX,то
outputi 6,100
' Скважность = 100%
else
' иначе
outputl 6,(Q / Tik) * 100
' подсчет скважности.
end if
else
' Если вых. сигнал < пилы, то
DiscretOut = 0
' на управляющий выход ноль
end if
if Pid3 < 0 then
' Если вых. сигнал < 0, то
outputi 3,DiscretOut
' управ. сигнал на 2-й дискретный выход
else
' иначе
outputi 2,DiscretOut
' управ. сигнал на 1-й дискретный выход
end if
Pila = Pila + Max/(Tik - 1)
' Перерасчет значения пилы
end if
outputi 1,Pila
' Вывод значения пилообразного сигнала
End Sub
Задание
1. Загрузите файл стратегии shim.gni и изучите организацию алгоритма широтно-импульсного модулятора.
2. Выявите влияние знака и величены отклонения переменной от уставки на продолжительность импульсов
Сигнал от объекта, характеризующий положение вала исполнительного механизма, может быть получен посредством «Блока аналогового ввода» с платы PCL – 818L, первого канала в списке за номером 0. В редакторе задач разбираемой стратегии (рисунок 58) этот сигнал через блок усреднения поступает на блок «ПИД-регулятора». На форме отображения (рисунок 59) через движковые регуляторы предусмотрена возможность ввода таких значений как: уставка, коэффициенты P, I и D, которые через связанные “БлокиТЭГ” тоже поступают к блоку ПИД регулирования. Аналоговый сигнал управления поступает в “Блок бейсик-сценария” (SCR3), представляющий собой ШИМ, рассмотренный ранее.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.