Передаточная функция объекта основного контура находится по кривой разгона объекта. Она имеет вид:
 (4)
(4)
Для нахождения передаточной функции объекта вспомогательного контура, будем рассматривать объект регулирования (участок трубы) как типовой одноемкостной объект, динамика которого может быть описана дифференциальным уравнением 1-го порядка:
 (5)
(5)
где T – время разгона, с;
к – степень самовыравнивания;
![]() – величина возмущающего воздействия (расход воды на
входе), м3/с;
– величина возмущающего воздействия (расход воды на
входе), м3/с;
![]() – величина регулируемого параметра (расход воды на
выходе), м3/с.
– величина регулируемого параметра (расход воды на
выходе), м3/с.
Так как расход воды на входе трубы равен расходу на выходе, то коэффициент самовыравнивания равен 1.
Время разгона зависит от объема участка трубопровода V, м3, а так же от номинального расхода Qн, м3/с и определяется по формуле:
 . (6)
. (6)
Значение V зависит от конструктивных параметров объекта, и определяется по формуле:
 . (7)
. (7)
Произведем расчеты по формулам 7 и 6:
 м3,
м3,
 с.
с.
Тогда дифференциальное уравнение, описывающее объект, будет иметь вид
 . (8)
. (8)
В объекте присутствует звено запаздывания
с ![]() с.
с.
В соответствии с (8) запишем передаточную функцию объекта
 (9)
(9)
В объекте присутствует звено запаздывания
с ![]() с.
с.
Исходные данные:
-
передаточная функция основного контура;
 -
передаточная функция вспомогательного контура.
-
передаточная функция вспомогательного контура.
При помощи программы производим расчет настроек ПИ-регуляторов каскадной и одноконтурной систем регулирования. Текст программы приведен в приложении.
Каскадная система регулирования:
- для основного регулятора: C1 =4.9608, C0 =1.2135;
- для вспомогательного: CC1 =5.3248, CC0 =14.05363.
Одноконтурная система регулирования: C1 = 5.6208, C0 = 0.9023.
Подставляем данные в модели АСР.
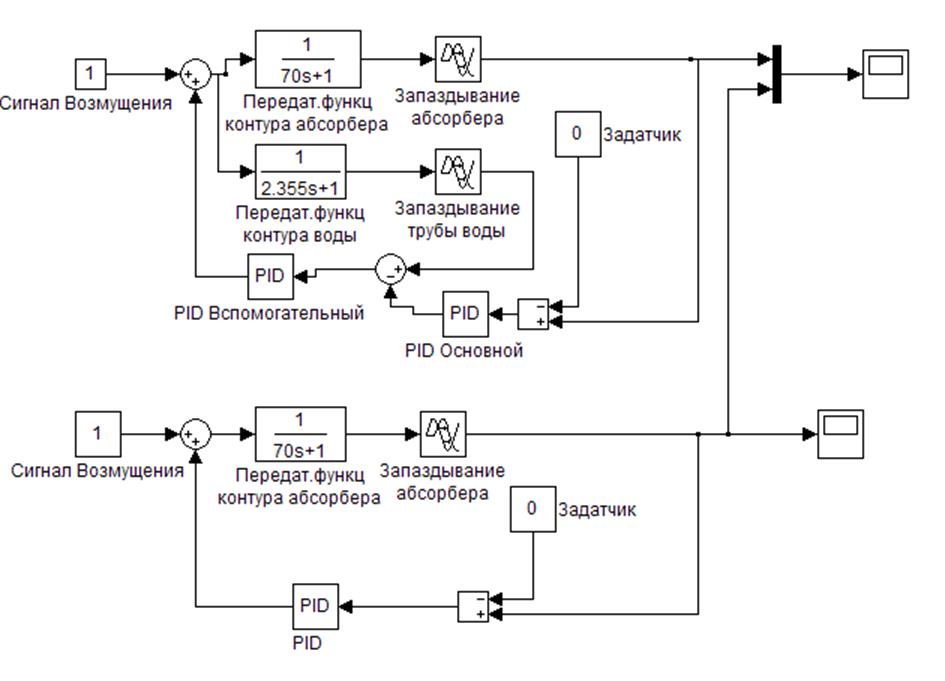
Рисунок 6 – Модели каскадной и одноконтурной АСР
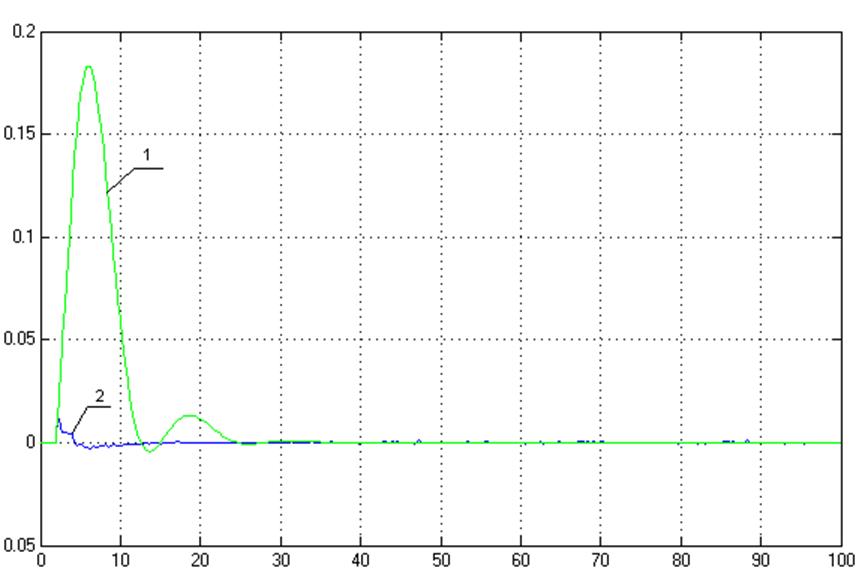
Рисунок 7 – Переходный процесс одноконтурной(1) и каскадной(2) АСР
Так как нам необходимо было исследовать и сравнить поведение систем регулирования при воздействии на них возмущающего воздействия задатчики мы поставили равным нулю.
В курсовом проекте был рассмотрен процесс производства соляной кислоты и приведены результаты разработки схемы автоматического управления, что позволяет повысить производительность процесса за счет внедрения новых средств автоматизации, сократить долю физического труда и сэкономить ресурсы. Так же произведен расчет настроек регуляторов для каскадной СР концентрации соляной кислоты.
1 Постоянный технологический регламент N 2-2006 по производству концентрированной каустической соды цеха 22 производства «Х и К» [Текст].– Саянск: Саянскхимпласт, 2006. – 135 с.
2. Андреев М.Д., Титович Л.В. Автоматизация технологических процессов и производств. Системы автоматизации и управления технологическими процессами [Текст]: Учебное пособие к курсовому и дипломному проектированию для студентов специальности 210200 направления 657900 всех форм обучения / Андреев М.Д., Титович Л.В. – Красноярск: СибГТУ, 2005. -136с.
Программа расчета настроек ПИ-регулятора для каскадной системы регулирования.
function PID_reg
w = 0.01;
tau_osn=3;
tau_kor=0.1;
T_osn=70;
T_kor= 2.355;
K_osn=1;
K_kor=1;
i=0;
%1 cikl
while i<=10000
p = (+1i)*w*i;
i = i+1;
W_kor = K_kor/(T_kor*p+1)*exp(-tau_kor*p);
W_osn = K_osn/(T_osn*p+1)*exp(-tau_osn*p);
A =W_osn/W_kor;
AO(i) = real(A);
A1(i) = imag(A);
if A1(i) > 0
wkr = w*i;
C1kr = -1/AO(i);
i=100001;
end;
end
C1 = 0.45*C1kr
C0 = 0.086*C1kr*wkr
i=10;
while i<=10000
p = (+1i)*w*i;
i = i+1;
W_kor = K_kor/(T_kor*p+1)*exp(-tau_kor*p);
W_osn = K_osn/(T_osn*p+1)*exp(-tau_osn*p);
R = -(C1+C0/p);
A = W_kor-W_osn*R;
AO(i) = real(A);
A1(i) = imag(A);
if A1(i) > 0
wkr=w*i;
C1kr=-1/AO(i);
i=100001;
end
end
CC1 = 0.45*C1kr
CC0 = 0.086*C1kr*wkr
%2 cikl
i=10;
while i<=10000
p = (+1i)*w*i;
i = i+1;
W_kor = K_kor/(T_kor*p+1)*exp(-tau_kor*p);
W_osn = K_osn/(T_osn*p+1)*exp(-tau_osn*p);
R1=-(CC1+CC0/p);
A =-R1/(1-W_kor*R1)*W_osn;
AO(i)= real(A);
A1(i)=imag(A);
if A1(i)>0
wkr=w*i;
C1kr=-1/AO(i);
i=100001;
end
end
C1 = 0.45*C1kr
C0 = 0.086*C1kr*wkr
i=10;
while i<=10000
p = (+1i)*w*i;
i = i+1;
W_kor = K_kor/(T_kor*p+1)*exp(-tau_kor*p);
W_osn = K_osn/(T_osn*p+1)*exp(-tau_osn*p);
R = -(C1+C0/p);
A = W_kor-W_osn*R;
AO(i) = real(A);
A1(i) = imag(A);
if A1(i) > 0
wkr=w*i;
C1kr=-1/AO(i);
i=100001;
end
end
CC1 = 0.45*C1kr
CC0 = 0.086*C1kr*wkr
%3 cikl
i=10;
while i<=10000
p = (+1i)*w*i;
i = i+1;
W_kor = K_kor/(T_kor*p+1)*exp(-tau_kor*p);
W_osn = K_osn/(T_osn*p+1)*exp(-tau_osn*p);
R1=-(CC1+CC0/p);
A =-R1/(1-W_kor*R1)*W_osn;
AO(i)= real(A);
A1(i)=imag(A);
if A1(i)>0
wkr=w*i;
C1kr=-1/AO(i);
i=100001;
end
end
C1 = 0.45*C1kr
C0 = 0.086*C1kr*wkr
i=10;
while i<=10000
p = (+1i)*w*i;
i = i+1;
W_kor = K_kor/(T_kor*p+1)*exp(-tau_kor*p);
W_osn = K_osn/(T_osn*p+1)*exp(-tau_osn*p);
R = -(C1+C0/p);
A = W_kor-W_osn*R;
AO(i) = real(A);
A1(i) = imag(A);
if A1(i) > 0
wkr=w*i;
C1kr=-1/AO(i);
i=100001;
end
end
CC1 = 0.45*C1kr
CC0 = 0.086*C1kr*wkr
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.