
Министерство образования РФ
Сибирский государственный технологический университет
Факультет АИТ
Кафедра АПП
РЕФЕРАТ
ТЕМА:« РЕЖИМЫ ВВОДА-ВЫВОДА»
|
Красноярск 2001г.
В микропроцессорных системах управления технологическими процессами имеется большое число внешних устройств. Для взаимодействия с ними могут использоваться четыре основных режима ввода – вывода:
¾ программно – управляемый;
¾ взаимодействия;
¾ передачи управления (захвата управления внешним устройством);
¾ ввода – вывода по прерываниям;
Программно – управляемый ввод-вывод означает, что все действия по обмену информацией с внешними устройствами выполняются командами в прикладной программе. Этот режим называют также синхронным обменом. В таких системах шина данных всегда находится под контролем центрального процессора, который управляет направлением передачи и временем обмена. Пример подобной организации дает система сбора технологической информации с программным выбором датчиков.
Основной недостаток программно – управляемой организации обмена состоит в том, что время передачи данных жестко фиксировано. Если при модернизации системы в ее состав будут введены периферийные устройства, обладающие более высокой скоростью передачи данных, чем прежние, то это не повлечет за собой ожидаемого роста пропускной способности всей системы. Максимальная эффективность САУ достигается только тогда, когда время передачи данных от одного устройства к другому не фиксировано, а наоборот, каждое из них работает со своей максимальной скоростью.
В режиме взаимодействия центральный процессор должен сначала получить сигнал готовности от внешнего устройства. Если внешнее устройство не готово к обмену данными, система будет ожидать, не выполняя при этом никаких действий. Режим взаимодействия имеет еще целый ряд названий : асинхронный подтверждения готовности, квитирования и др. Центральный процессор посылает по линии управления сигналы вызова внешнего устройства и указания направления передачи (ЧТ или ЗП). Вслед за этим наступает период ожидания, в течении которого внешнее устройство должно ответить по второй линии управления, что оно приняло переданный ему запрос и готово к обмену данными.
Асинхронная система передачи данных достаточно удобна и надежна, поскольку в организации участвуют оба устройства. Если одно из периферийных устройств неисправно или включено, то обмен данными не состоится, о чем можно легко уведомить систему. Можно, например, установить некоторое фиксированное время ожидания (время простоя) для каждого устройства. Если в пределах этого времени сигнал готовности не будет получен, то формируется специальный сигнал, привлекающий внимание оператора процесса к этому устройству, а система сбора информации продолжает свою работу.
Режим ввода – вывода с передачей управления характеризуется тем, что на время передачи данных действие центрального процессора приостанавливается и он отключается от шин адреса и данных. Образно говоря, управление шинами захватывает то внешнее устройство, которое берет на себя инициативу в организации обмена данными. Не увеличивается содержимое программного счетчика, не считывается очередная команда, но текущие значения во всех регистрах остаются без изменения. Это состояние длится, пока внешнее устройство выставляет на шину управления сигнал «Захват» (ЗХВ). Как только этот сигнал снимается , микропроцессор возвращается к выполнению прерванной программы, начиная с первого такта следующего машинного цикла.
В вычислительных системах режим передачи управления обычно называют прямым доступом к памяти (ПДП), так наиболее типичными примерами передачи управления являются: считывание данных в ОЗУ из внешнего накопителя большой емкости ( магнитный диск, кассета), возобновление данных на экране дисплея непосредственно из магнитного накопителя и т. д. Конечно, при прямом доступе к памяти ни преобразование данных, ни проверка каких- либо условий невозможны, так как обмен осуществляется только с помощью аппаратных средств.
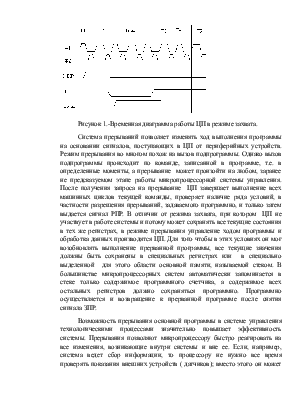
Ввод- вывод по прерываниям, называемый также форсированным вводом – выводом, подразумевает, что действия по обмену информацией инициируются самими периферийными устройствами, которые генерируют сигналы запросов на обслуживание. При восприятии сигнала запроса центральный процессор прерывает выполнение текущей программы, запоминает ее состояние, а затем находит устройство, запросившее обслуживание , и осуществляет обмен данными. После завершения обмена восстанавливается состояние прерванной программы и возобновляется ее выполнение. В таком режиме на ввод- вывод расходуется гораздо меньше времени, чем в программно – управляемом, поэтому система может выполнить больший объем полезной работы.
Обычно периферийные устройства со скоростью передачи информации до 10К байт/с обмениваются информацией с центральным процессором по мере своей готовности; устройства со скоростью передачи более 30К байт/с обмениваются информацией в режиме прямого доступа к памяти без участия центрального процессора.
Для организации всех рассмотренных выше режимов ввода – вывода центральный процессор вырабатывает ряд специальных сигналов управления, передаваемых либо по специальным линиям; либо по шине данных в первом машинном цикле М1.Последние сигналы должны выделяться и фиксироваться с помощью системного контроллера, они организуют и согласуют работу всех устройств памяти и ввода – вывода. Хотя у каждого микропроцессора имеется свой, только ему присущий набор сигналов и приказов управления, но есть и общие, присутствующие практически во всех микропроцессорных системах. Наименования и условные обозначения таких приказов и сигналов могут быть различными, но сущность остается одинаковой.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.