Если величина электрической редукции редусина равна передаточному числу используемого механического редуктора, вал редусина можно состыковать непосредственно с реечной шестерней (рис. 3.3.11в). Все ограничения по разгону и торможению при такой схеме снимаются.
|
|
|
|
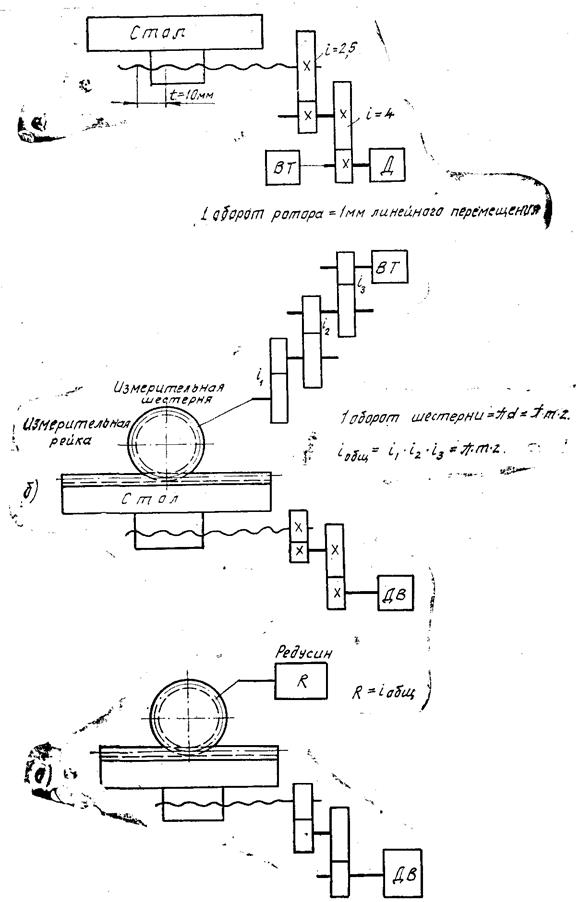
Рис. 3.3.11. Различные варианты конструирования обратной связи по положению для обеспечения цены оборота фазы, равной 1 мм:
а) с помощью ВТ, связанного с линейным перемещением через силовой редуктор и шариковый ходовой винт; б) с помощью ВТ, связанного с линейным перемещением через измерительную рейку и шестерню;
в) с помощью редусина.
Среди аналоговых датчиков наибольшую точность позиционирования можно получить, используя датчики типа «Индуктосин», работающие в амплитудном режиме. Общий вид линейного датчика такого типа и диск кругового датчика представлены на рис. 3.3.12.
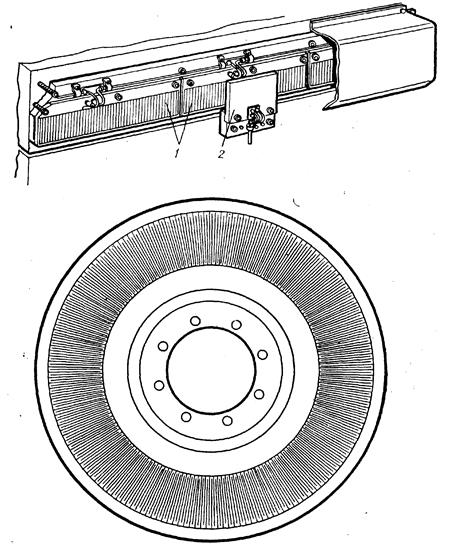
Рис. 3.3.12. Общий вид линейного датчика типа «Индуктосин» и диск кругового датчика этого же типа
Он состоит из двух основных частей:
— линейки (1), имеющей длину, несколько превышающую величину измерения, и набранной из отдельных шкал длиной по 250 мм. Каждая шкала имеет одну печатную обмотку, которая последовательно соединяется с обмотками других шкал.
— ползунка (2), который перемещается относительно линейки. В конструкциях станков часто ползунок закрепляется неподвижно, а линейка крепится на подвижный узел и перемещается относительно ползунка.
Принцип работы датчика обратной связи типа «Индуктосин» представлен на рис. 3.3.13. Ползунок датчика имеет две печатные обмотки, сдвинутые геометрически, а, следовательно, и электрически на 1/4 шага, т. е. на 90° . На каждую из обмоток подается синусоидальный сигнал одинаковой частоты (10 кГц), причем на первой обмотке имеется e1 = U0 sinαе, а на второй e2 = U0 cosαе,
где αе - заданный угол смещения (отражающий заданную величину перемещения).
На шкале индуцируется напряжение, равное:
Uвых = U0 sinαе cosαm - U0 cosαе sinαm
где αm—фактический угол, отражающий фактическое перемещение
рабочего органа станка.
Следовательно:
Uвых = U0 sin (αе - αm)
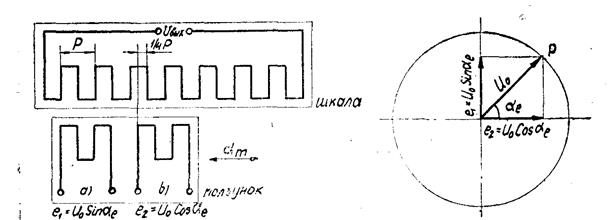
Рис. 3.3.13. Принцип работы датчика обратной связи типа «Индуктосин».
Таким образом, на привод поступает сигнал на перемещение всякий раз, когда есть разница в этих углах. При фактическом положении, равном заданному, когда αе = αm , напряжение на выходе равно нулю. Точность позиционирования рабочих органов станка при использовании «Индуктосина» может лежать в пределах ± 0,005—± 0,01 мм.
В последнее время в системах ЧПУ типа CNC наибольшее распространение получили импульсные оптические или магнитные датчики положения (измерительные преобразователи перемещения), так как они обеспечивают большую точность и лучше согласуются с электронными блоками системы ЧПУ.
Простейшая конструкция кругового импульсного фотоэлектрического датчика представлена на рис. 3.3.14. Он состоит из диска с прорезями, устанавливаемого, как правило, на конце ходового винта. С одной стороны диска располагается источник света, а с другой — фотодиод. При прохождении прорези около фотодиода, он засвечивается, формируя в электрической цепи дискретный импульс. В этом случае количество импульсов характеризует фактическую величину перемещения рабочего органа станка.
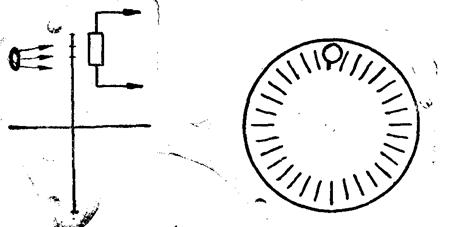
Рис. 3.3.14. Простейшая конструкция кругового импульсного фотоэлектрического датчика
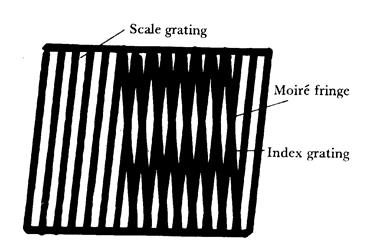
Широкое применение находят линейные фотоэлектрические датчики. В датчике (рис. 3.3.15) шкала (линейка) 1 и ползунок 2, выполненные из стекла и имеющие одинаковый шаг штрихов, накладываются друг на друга с небольшим зазором.
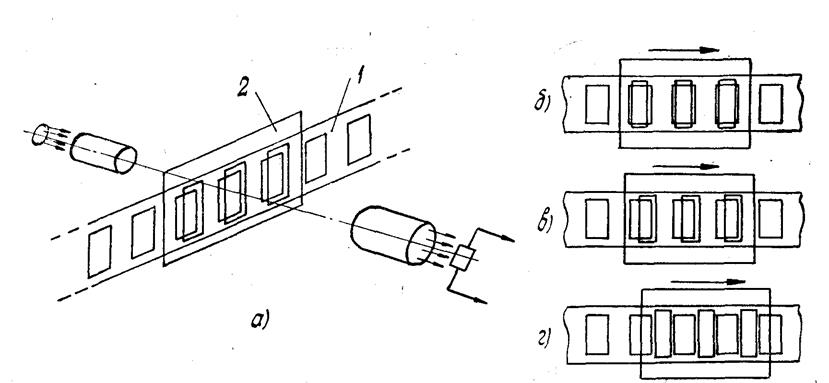
Рис. 3.3.15. Линейный фотоэлектрический датчик:
а) принцип действия; б) положение, соответствующее максимальной освещенности; в) среднее положение; г) положение, соответствующее минимальной освещенности.
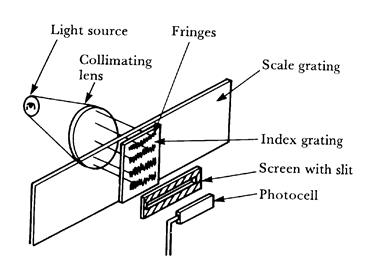
При смещении этих двух частей относительно друг друга, освещенность фотодиода за счет явлений, происходящих в дифракционных решетках, будет периодически меняться от максимальной величины до минимальной величины и опять до максимальной. Формируя в электронной схеме импульсы, соответствующие моменту максимальной освещенности, получают информацию о величине перемещения. Так как в работе одновременно участвуют несколько штрихов, погрешности нарезки каждого штриха усредняются, а точность измерения значительно повышается. Если штрихи съемника наклонены под некоторым небольшим углом относительно штрихов шкалы, затемненные полосы (так называемые “муаровые полосы”) перемещаются в вертикальном направлении (рис. 3.3.16), обеспечивая ещё большее усреднение ошибки нарезки каждого штриха.
|
|
|
Рис. 3.3.16 Принцип работы датчика с “муаровыми полосами”.
Импульсные датчики позволяют получить информацию о величине и направлении перемещения, а также о скорости перемещения. Величина перемещения определяется числом импульсов, выдаваемых датчиком, а направление — каналом, по которому поступают эти импульсы. Скорость перемещения определяется частотой поступления импульсов.
Линейный (рис. 3.3.17а) и круговой (рис. 3.3.17б) импульсные оптические датчики состоят из механической, оптической и электронной частей.
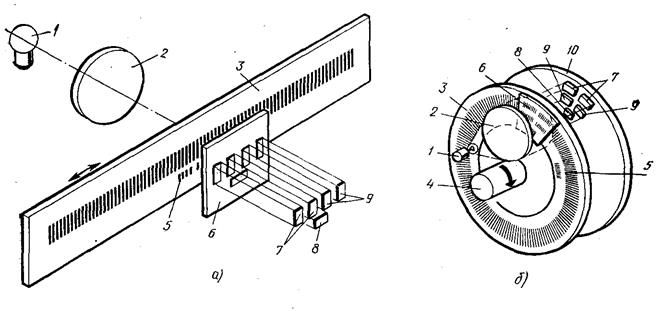
Рис. 3.3.17. Линейный (а) и круговой (б) импульсные оптические датчики:
1 — осветитель, 2—линза, 3 — шкала, 4 — вал, 5 — риски нуль-метки, 6 — съемник, 7 — фотодиоды (сигнал Ie1), 8 — фотодиод нуль-метки (сигнал Ie0), 9 — фотодиоды (сигнал Ie2); 10 — корпус
Механическая часть обеспечивает точное перемещение шкалы с рисками относительно съемника (или считывающей головки). Корпус защищает датчик от проникновения, пыли, влаги и от механических воздействий. Оптическая часть содержит фотодиод, линзу, съемник с растровыми штрихами и основную шкалу в виде диска (для кругового датчика) или линейки (для линейного датчика). При движении шкалы меняется световой поток, идущий через растровые риски съемника, и через фотодиоды проходит ток.
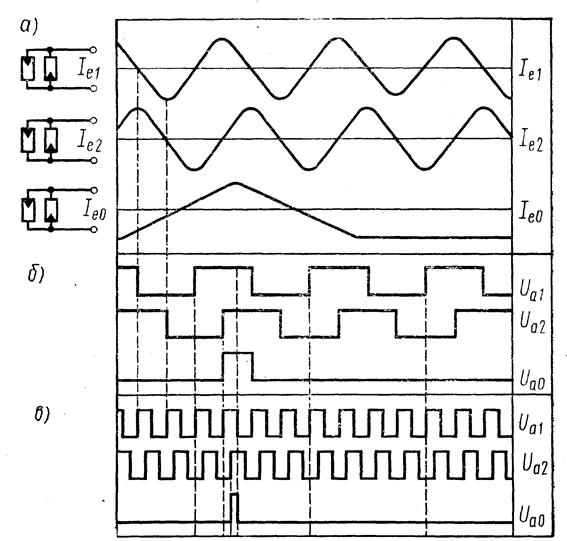
Рис. 3.18. Диаграмма сигналов оптического датчика:
а — сигнал на выходе фотодиодов, б—то же, на выходе усилителя-формирователя, в — то же, после деления на 4
Шкала и съемник создают в паре растровое сопряжение. На съемнике растры расположены в два сектора, сдвинутые друг относительно друга на 1/4 шага штрихов. Напротив каждого из секторов съемника расположена пара фотодиодов, которые выдают первичные сигналы, изменяющиеся по синусоидальному и косинусоидальному закону (при смещении шкалы относительно съемника) (рис. 3.3.18.а).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.