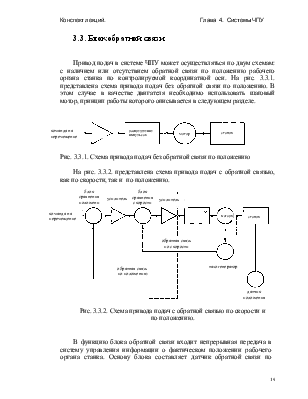
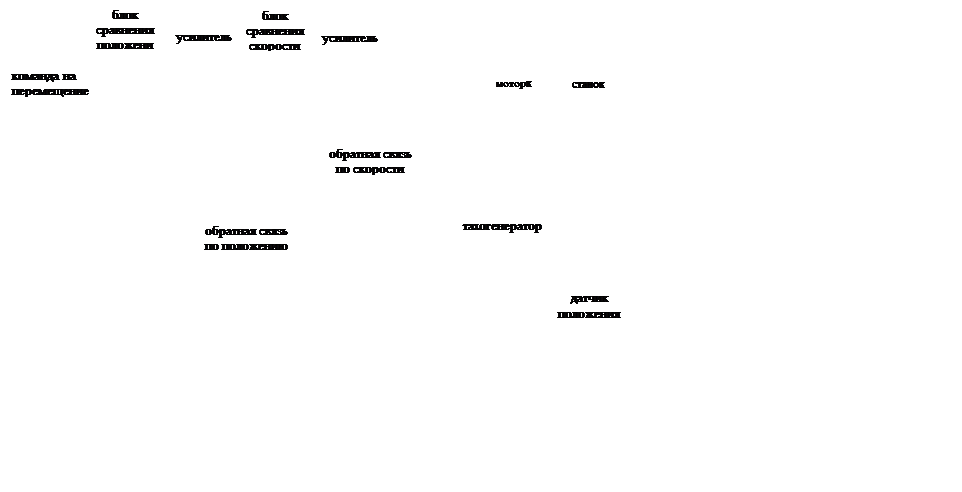
Привод подач в системе ЧПУ может осуществляться по двум схемам: с наличием или отсутствием обратной связи по положению рабочего органа станка по контролируемой координатной оси. На рис. 3.3.1. представлена схема привода подач без обратной связи по положению. В этом случае в качестве двигателя необходимо использовать шаговый мотор, принцип работы которого описывается в следующем разделе.
|
|
|
|
|
|

Рис. 3.3.1. Схема привода подач без обратной связи по положению
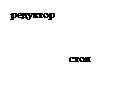
На рис. 3.3.2. представлена схема привода подач с обратной связью, как по скорости, так и по положению.
|
|
|
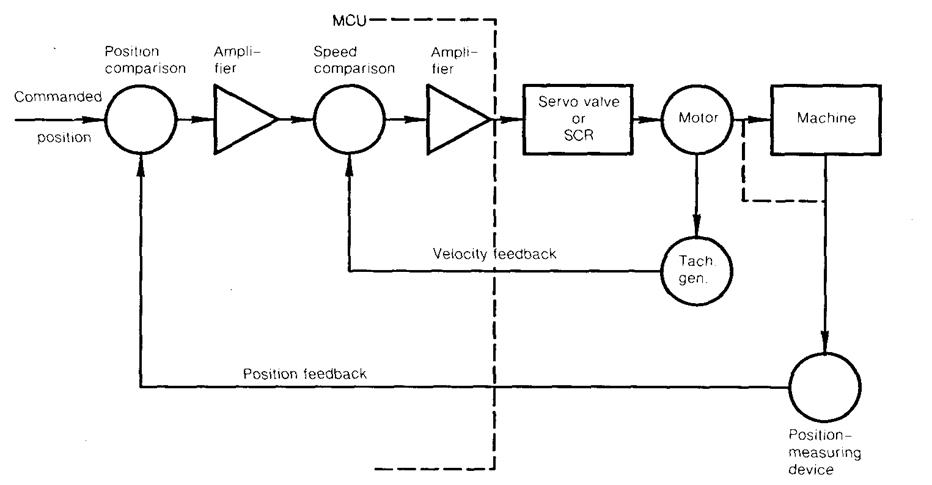
по положению.
В функцию блока обратной связи входит непрерывная передача в систему управления информации о фактическом положении рабочего органа станка. Основу блока составляет датчик обратной связи по положению (или, как его называют, измерительный преобразователь перемещения) и все элементы согласования датчика с узлами системы.
Датчики обратной связи, применяемые в станках с ЧПУ, по принципу их работы можно подразделить на две группы: абсолютные и циклические. В абсолютных датчиках каждому его положению по всей длине перемещения соответствует вполне определенное и единственное кодовое значение или точно определённая величина монотонно изменяющегося выходного сигнала (рис.3.3.3.а). Системы с абсолютными датчиками сохраняют информацию о положении рабочего органа станка по соответствующей координатной оси даже после отключения электрического питания и после включения системы вновь не требуют выхода станка в исходные (референтные) точки по каждой координате. У циклических датчиков изменение параметров выходного сигнала носит циклический характер, принимая одни и те же значения при различных положениях датчика (рис.3.3.3.б). У циклических датчиков длина перемещения, соответствующая однозначному сигналу, всегда меньше длины всего хода рабочего органа станка, на котором установлен датчик обратной связи. Такие датчики проще по конструкции, но после каждого отключения сети требуют проведения процедуры обнуления, то есть выхода в нулевые точки по каждой координате.
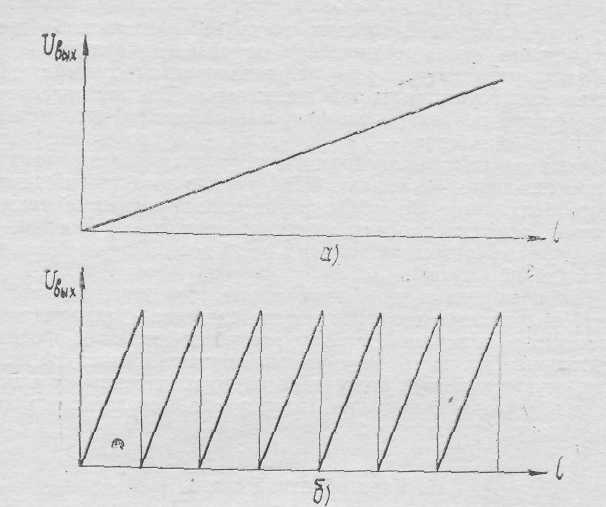
Рис. 3.3.3. Изменение величины выходного сигнала датчиков:
а) для абсолютных датчиков; б) для циклических датчиков
Для больших длин перемещения измерение с высокой степенью точности для абсолютных датчиков не реально, так как класс точности такого датчика должен быть весьма высоким. Например, для измерения хода длиной в 1м с точностью 0,01 мм погрешность измерения не должна превышать 0,001 %. Поэтому при необходимости получения в системе абсолютного отсчета текущих координат иногда применяют многоканальный блок обратной связи, где в каждом канале используется абсолютный циклический датчик с определенной зоной однозначности (рис.3.3.4.). Датчики различных каналов связаны между собой шестернями с определённым передаточным отношением, зависящим от шага цикличности в каждом канале.
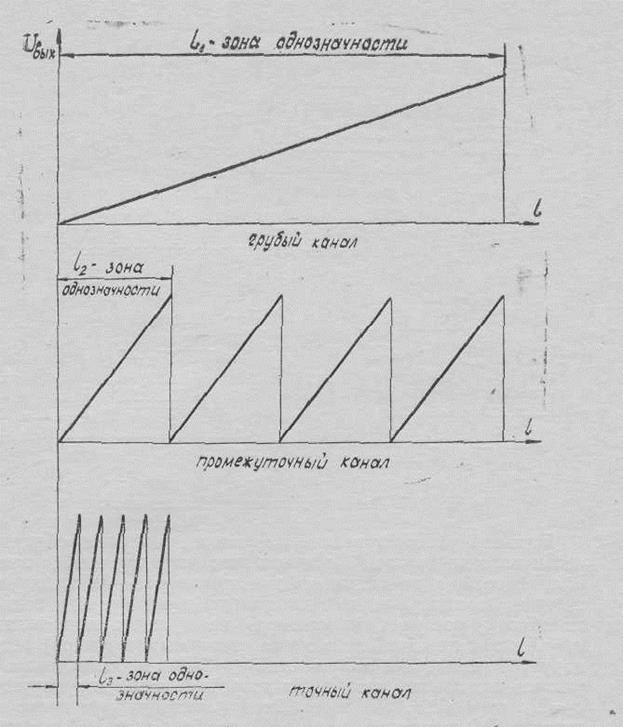
Рис. 3.3.4. Принцип работы абсолютного многоканального датчика обратной связи по положению
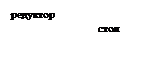
По конструкции датчики обратной связи по положению подразделяются на круговые и линейные. Круговые датчики, имеющие, как правило, проще конструкцию, монтируются непосредственно на ходовом винте (Рис. 3.3.5.а) или связаны с ним через шестерёнчатую передачу (Рис. 3.3.5.б).
|
Рис. 3.3.5.а |
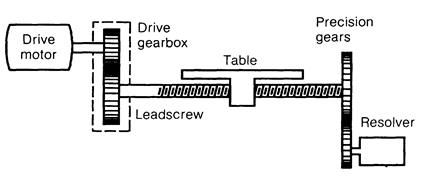
Рис. 3.3.5.б |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Таким образом, они контролируют угол поворота шарикового ходового винта, оставляя без обратной связи конечное звено, а именно зацепление винта с гайкой. Все ошибки, возникающие из-за погрешности одиночных шагов и накопленной погрешности ходового винта, а также погрешности, появляющейся за счёт тепловых деформаций и недостаточной жёсткости ходового винта, плюс погрешность в самом зацеплении винта с гайкой (например, имеющийся люфт) переходят на деталь. Правда, надо иметь в виду, что современные системы ЧПУ позволяют вводить коррекцию для устранения этих погрешностей. С этой целью на новом станке (и далее периодически) проверяется его точность позиционирования и определяется погрешность по всей длине перемещения рабочего органа. Величина этой погрешности вносится в память системы. В процессе работы станка при позиционировании в определённую точку происходит обращение системы в данную память, определяется величина погрешности в данной точке и автоматически осуществляется коррекция заданной координаты.
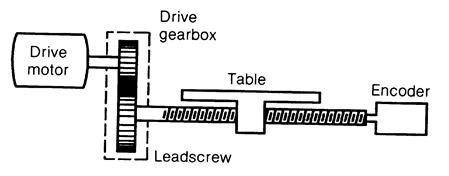
При использовании линейного датчика (Рис. 3.3.6) обратной связью охватываются все звенья кинематической цепи подачи, включая конечное звено – винт с гайкой. Точность обработки при этом значительно возрастает. Однако конструктивно линейные датчики имеют более сложную конструкцию и, соответственно, выше стоимость.
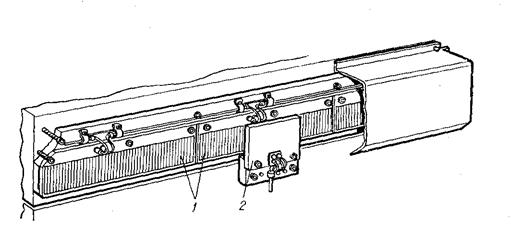
Рис. 3.3.6. Пример линейного датчика обратной связи
По виду выходного сигнала датчики подразделяются на кодовые, аналоговые и импульсные.
Кодовые датчики представляют собой диск (для кругового датчика) или пластину (для линейного датчика) из стекла или металла, на которых нанесены шаблоны разрядов в двоичном коде.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.