Параграф 3. ОСНОВНЫЕ БЛОКИ СИСТЕМ ЧПУ
3.1. Вычислительный блок
Информация в систему ЧПУ вводится отдельными кадрами в коде ISO. Перемещением отдельных рабочих органов станка по координатным осям осуществляет интерполятор. Однако перед тем как данные о заданных перемещениях поступают на вход интерполятора, они претерпевают некоторые преобразования. Прежде всего, информация должна быть преобразована в вид и форму, воспринимаемую вычислительными блоками системы. Далее, заданные величины перемещений должны быть пересчитаны с учётом введённой коррекции на размер инструмента (его длину и радиус), величину износа режущих кромок и заданных смещений нулевых точек в пространстве. Необходимо учесть коррекции, компенсирующие воздействия температуры и геометрических погрешностей станка. В дополнение к этому, нужно иметь ввиду, что современные системы ЧПУ, во многих случаях, не требуют точного базирования детали на станке, так как перед её обработкой контактный датчик ощупывает базовые поверхности детали и в соответствии с полученной информацией производится пересчёт системы координат станка по отношению к фактической системе координат детали. Все эти преобразования осуществляются в вычислительном блоке.
3.2. Интерполяторы
Основным элементом, входящим в вычислительный блок, является интерполятор. Он обеспечивает заданную траекторию движения инструмента относительно детали. Когда в систему вводят информацию о перемещении рабочих органов станка, то задают её в виде рассчитанных заранее координат опорных точек. Заданный контур между опорными точками, образован ли он участками прямых линий, дугами окружностей или другими более сложными кривыми, выполняется с необходимой степенью точности за счет выходной информации в унитарном коде, непрерывно поступающей с интерполятора на приводы системы. Унитарный код представляет собой последовательность импульсов, количество которых по каждой координате станка точно соответствует числу, заданному по программе в соответствующем кадре, с учетом цены импульса, т. е. величины перемещения исполнительного органа станка с приходом одного дискретного импульса. Время, за которое выдается это количество импульсов, равно заданному времени перемещения от одной опорной точки до другой. Таким образом, частота выходных импульсов определяет скорость подачи.
В зависимости от того, реализация какой математической функции положена в основу аппроксимации программируемых кривых, интерполяторы подразделяются на линейные, линейно-круговые, параболические, спиральные и т. д.
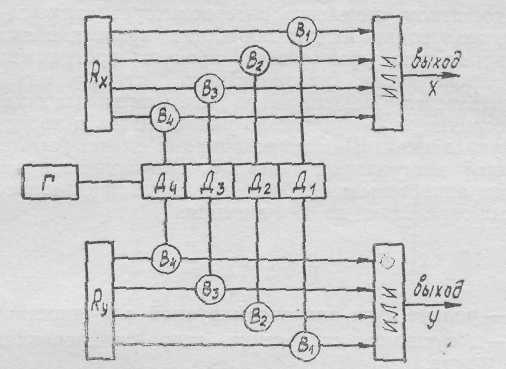
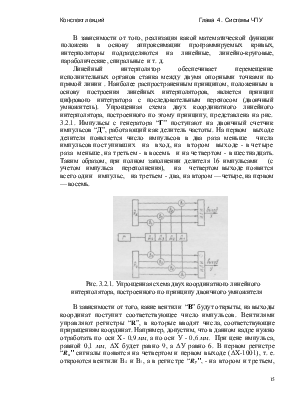
Линейный интерполятор обеспечивает перемещение исполнительных органов станка между двумя опорными точками по прямой линии . Наиболее распространенным принципом, положенным в основу построения линейных интерполяторов, является принцип цифрового интегратора с последовательным переносом (двоичный умножитель). Упрощенная схема двух координатного линейного интерполятора, построенного по этому принципу, представлена на рис. 3.2.1. Импульсы с генератора “Г” поступают надвоичный счетчик импульсов “Д”, работающий как делитель частоты. На первом выходе делителя появляется число импульсов в два раза меньше числа импульсов поступивших на вход, на втором выходе - в четыре раза меньше, на третьем - в восемь и на четвертом - в шестнадцать. Таким образом, при полном заполнении делителя 16 импульсами (с учетом импульса переполнения), на четвертом выходе появится всего один импульс, на третьем - два, на втором — четыре, на первом — восемь.
|
|
Рис. 3.2.1. Упрощенная схема двух координатного линейного интерполятора, построенного по принципу двоичного умножителя
В зависимости от того, какие вентили “В” будут открыты, на выходы координат поступит соответствующее число импульсов.Вентилями управляют регистры “R”, в которые вводят числа, соответствующие приращениям координат. Например, допустим, что вданном кадре нужно отработать по оси Х - 0,9 мм, а по оси У - 0,6 мм. При цене импульса, равной 0,1 мм, ΔХ будет равно 9, аΔУ равно 6. В первом регистре “Rx”сигналы появятся начетвертом и первом выходе (ΔХ-1001), т. е. откроются вентили В4 и В1, а в регистре “Ry”, - на втором и третьем, (ΔУ = 0110), т.е. откроются вентили В2 и В3. Таким образом, навыходе по координате Xпоявится 8+1=9 импульсов, ана выходе по координате У будет 4 + 2 = 6 импульсов.
Количество двоичных разрядов в делителе “Д” определяет максимальныйразмер, который можно отработать в данной системе с одного кадра.
Недостатком линейных интерполяторов является то, что при использовании их для обработки криволинейных контуров значительно усложняется процесс программирования. При аппроксимации криволинейного контура участками прямых появляется большое число дополнительных опорных точек, координаты которых надо рассчитывать и вводить в систему управления. Шаг аппроксимации может быть выражен величиной центрального угла Δφ, опирающегося на концы участков аппроксимации. Величину шага при аппроксимации, хордами определяют из соотношения:
Δφ = 2 arc cos (1 — δ/R ),
где: R— радиус дуги аппроксимируемой окружности;
δ — допустимое отклонение аппроксимированного контура.
Длина линейного участка (длина хорды) может быть определена как :
Δ L=Ö8R δ. Например, для R = 150 мм и δ = 0,1длина линейного участка, обрабатываемого при считывании одного кадра, будет равна
Δ L = Ö8*150*0,1![]() = 11мм. Таким образом, при обработке
полной окружности указанного радиуса с
отклонением 0,1 мм потребуется около 85 кадров. При наличии кругового интерполятора, для этого случая требуется всего 4 кадра, если интерполятор работает по
отдельным квадрантам, или всего один кадр, если интерполятор работает по полной
окружности.
= 11мм. Таким образом, при обработке
полной окружности указанного радиуса с
отклонением 0,1 мм потребуется около 85 кадров. При наличии кругового интерполятора, для этого случая требуется всего 4 кадра, если интерполятор работает по
отдельным квадрантам, или всего один кадр, если интерполятор работает по полной
окружности.
Поэтому на станках, которые предназначены вести обработку преимущественно сложных контуров, используются линейно-круговые интерполяторы, обеспечивающие перемещение исполнительных органов станка от одной опорной точки до другой как по прямой линии, так и по дуге окружности.
В основу линейно-кругового интерполятора могут быть заложены три схемы: 1) схема получения кривых второго порядка общего вида с помощью двух интеграторов, замкнутых, друг на друга; 2) схема с использованием обычного параметрического линейного интерполятора с блоком постоянной памяти, в которую заложены значения sin а и cos а через достаточно малые интервалы углов; 3) схемы, работающие по методу оценочной функции.
Первая схема наиболее сложная, но обеспечивает более точное воспроизведение контура.
Вторая схема автоматически аппроксимирует заданную дугу окружности участками прямых линий. Значение длины хорды Δ L вводится программой или вычисляется в зависимости от радиуса обрабатываемой дуги. От программы также вводится начальный угол и угол обработки. Значения sin а и cos а для каждой хорды автоматически выбираются в нужной последовательности из постоянной памяти и вводятся в регистры R.
Недостатком интерполяторов, построенных по этой схеме, является необходимость в достаточно большом запоминающем устройстве и наличии погрешности за счет аппроксимации дуги участками прямых. Кроме того, здесь возможна обработка только определенных радиусов, отличающихся друг от друга на заданную дискретность, а также усложняется ввод в систему коррекции инструмента по диаметру.
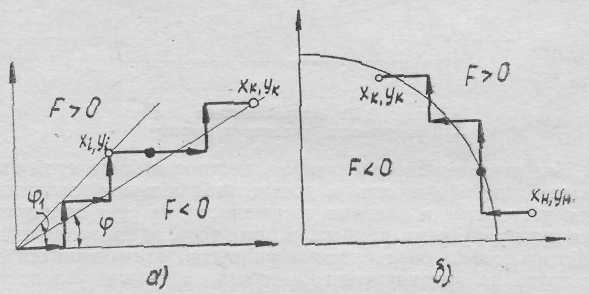
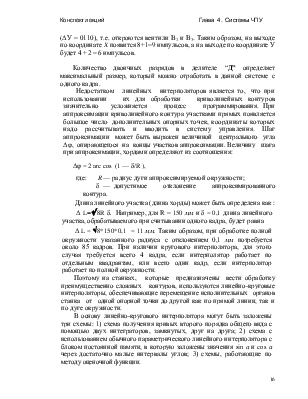
Принцип работы интерполятора, работающего по методу оценочной функции, заключается в том, что при выработке очередного управляющего импульса логическая схема производит оценку, по какой координате следует выдать этот импульс, чтобы суммарное перемещение исполнительного органа станка максимально приближало его к заданному контуру. Рассмотрим работу этого интерполятора в линейном режиме (Рис. 3.2.2.а).
|
|
Рис. 3.2.2. Принцип работы интерполятора, работающего по методу оценочной функции. а – в линейном режиме; б – в круговом режиме.
Интерполируемая прямая делит плоскость, в которой она расположена, на две области: область над прямой, где оценочная функция Fположительна, т. е. F >0, и область, где оценочная функция отрицательна, т. е. F<0 (рис.3.2.2.а). Все точки, лежащие на теоретически заданной линии, имеют F = 0. Траектория интерполяции представляет собой определенную последовательность элементарных перемещений вдоль координатных осей. Интерполяция методом оценочной функции состоит в том, что, если промежуточная точка траектории находится в области F>0, то следующий шаг делается по оси X. Если же промежуточная точка находится в области F<0, шаг делается по оси У.
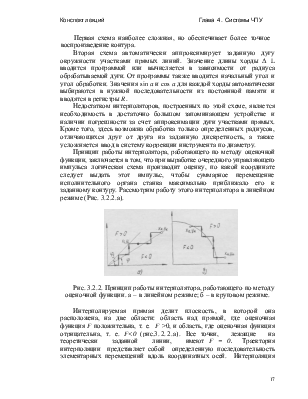
При круговой интерполяции методом оценочной функции плоскость XY делится на две области дугой окружности (Рис. 3.2.2.б).
Область внутри дуги имеет оценочную функцию F <0, область вне дуги имеет F>0. Для самой дуги F = 0. При отработке дуги окружности, находящейся в первом квадранте, против часовой стрелки последовательность шагов следующая: если промежуточная точка траектории находится в области F >0, шагделается вдоль координаты — X, если в области F <0, то очередной шаг делается вдоль + У.
Точность линейно-круговой интерполяции по методу оценочной функции лежит в пределах одного шага (цены импульса).
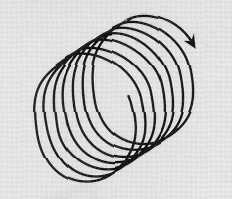
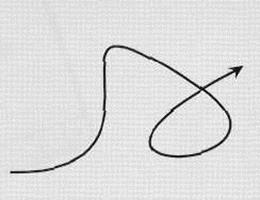
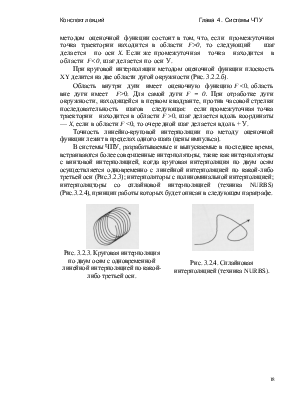
В системы ЧПУ, разрабатываемые и выпускаемые в последнее время, встраиваются более совершенные интерполяторы, такие как интерполяторы с винтовой интерполяцией, когда круговая интерполяция по двум осям осуществляется одновременно с линейной интерполяцией по какой-либо третьей оси (Рис.3.2.3); интерполяторы с полиноминальной интерполяцией; интерполяцторы со сплайновой интерполяцией (техника NURBS) (Рис.3.2.4), принцип работы которых будет описан в следующем параграфе.
|
Рис. 3.2.3. Круговая интерполяция по двум осям с одновременной линейной интерполяцией по какой-либо третьей оси. |
Рис. 3.2.4. Сплайновая интерполяцией (техника NURBS). |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.