Заменяем временную (0,1; 0,2; 0,3, ...) шкалу Ркр постоянной; по графику и расчетным значениям Ркр (см.табл. 2.1) определяем текущие значения d и в долях единицы заносим их в таблицу 2.1.
Определяем расчетом по формулам и заносим в таблицу 2.1 текущие значения:
- теоретической скорости трактора
 (2.6)
(2.6)
- рабочей скорости трактора.
 (2.7)
(2.7)
- тяговой мощности трактора
 (2.8)
(2.8)
- тягового КПД трактора
 (2.9)
(2.9)
и удельного тягового расхода топлива
 (2.10)
(2.10)
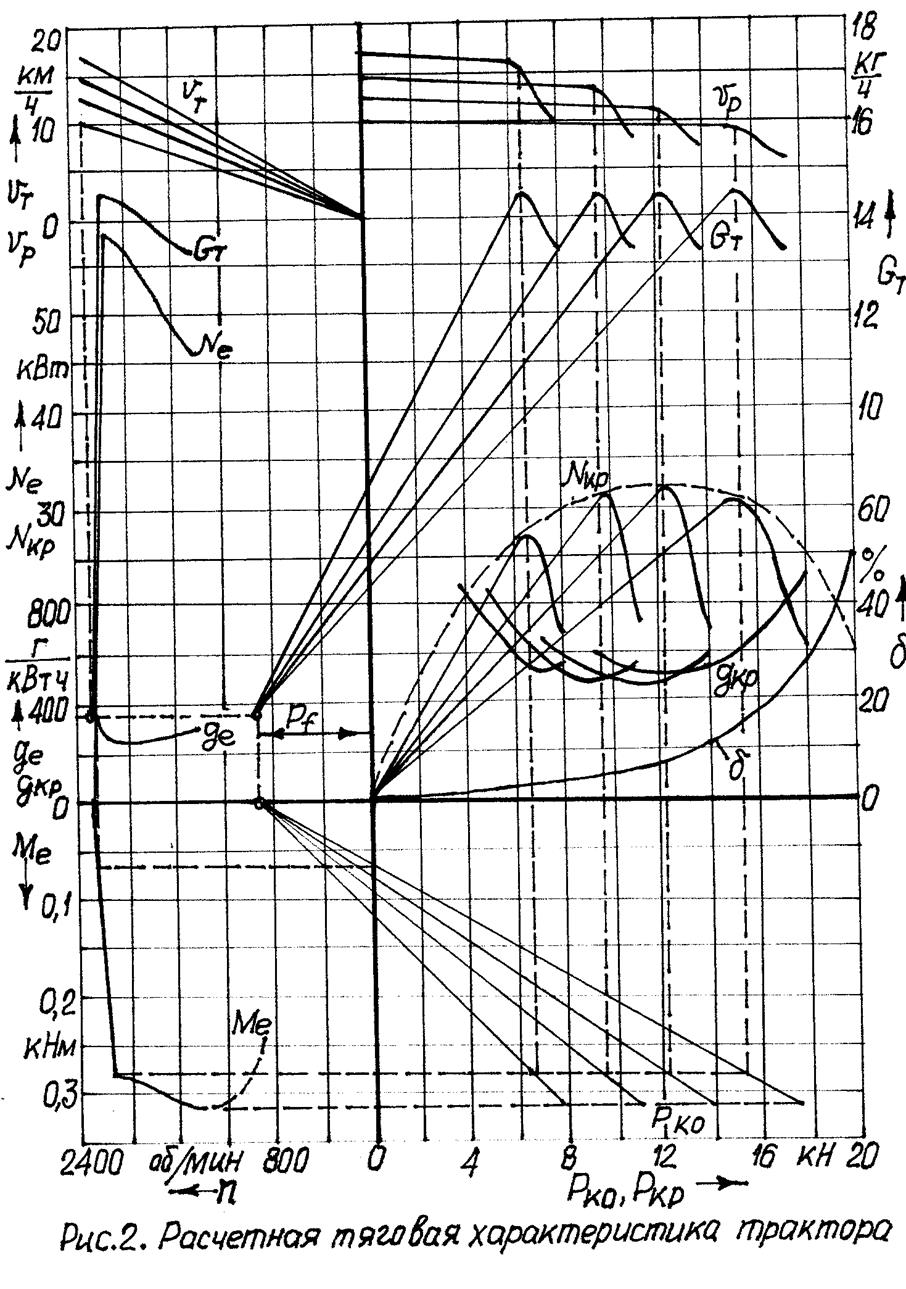
Предусмотренные в таблице 2.1 колонки Dо и hмту оставляем свободными, а по полученным данным строим на правой половине листа 1 расчетную тяговую характеристику трактора (см. рис. 2).
Поскольку расчетные значения крутящего момента двигателя Ме (см.табл. 2.1 и рис.2) лежат главным образом на корректорной ветви скоростной характеристики (режим кратковременно допустимой перегрузки), то при малом заданном значении jх, выборе пониженного расчетного ряда передач или большой энергонасыщенности трактора может получиться так, что все расчетные значения рабочей скорости Vр на одной, нескольких или всех расчетных передачах равны нулю. В этом случае необходимо составить дополнительную таблицу 2.1,а и выполнить графоаналитический расчет для тех передач, на которых Vр=0 (d=1).
Таблица 2.1,а Результаты графоаналитического тягового расчета трактора
|
Передача |
Ркр, кН |
d |
Vт км/ч
|
Vр км/ч |
Nкр кВт |
Gт Кг/ч |
gкр г/кВтч |
Ne кВт |
hтяг |
Do |
hмту |
|
0 |
|||||||||||
|
... |
|||||||||||
|
Ркрj |
Текущие значения Ркр (не менее семи) в интервале 0...Ркр принимаем удобными для последующего графического определения по ним текущих значенийd, Vт, Gт и Ne, а также расчета Vр, Nкр, gкр и hтяг по выше приведенным формулам и построения их графиков. Если трактор полностью буксует на всех расчетных передачах, то правые концы кривых Vp и Nкр будут иметь одинаковое значение - нуль при Ркрj, а кривые Nкр на высших передачах лежать выше кривых на низших передачах. Такой вид тяговой характеристики говорит о том, что в заданных условиях полностью реализовать потенциально возможную эффективную мощность двигателя в тяговую мощность переносимого поступательного движения невозможно. Поэтому параллельно с потоком мощности Nкр есть возможность переноса к внешним потребителя потоков мощности Мвом и Nгс через МОМ (механизм отбора мощности) и ГСОМ (гидросистема отбора мощности).
Для определения мощности, которую можно подвести к МОМ и ГСОМ параллельно с мощностью Nкр, необходимо отложить на шкале Ркр известное значение тягового сопротивления агрегатируемой машины Rсхм=Ркр, последовательно спроектировать его до пересечения с лучом Рко и регуляторными ветвями Ме и Nе, а затем на шкале N определить разность полученного значения Nе с ее максимальным или допустимым правилами технической эксплуатации значением.
График экспериментальной тяговой характеристики трактора по ГОСТ 7057-81 обычно оформляют как первый квадрант расчетной характеристики.
Принципиальным недостатком тяговых характеристик является то, что они полностью изменяются при изменении свойств опорной поверхности, в частности jx, f, i, а также состава машинно-тракторного агрегата. Поэтому для оценки тягово-скоростных свойств, топливной экономичности, проходимости и агрегатируемости трактора в реальных условиях необходимо иметь множество тяговых характеристик. Кроме того, тяговые характеристики практически невозможно использовать для сравнительной оценки собственником основных эксплуатационных свойств и возможной себестоимости работы тракторов разных тяговых классов и назначения, а значит не позволяют владельцу, распорядителю и пользователю выбрать технологически и экономически выгодную модель трактора. Устранить эти принципиальные недостатки позволяет динамический паспорт - многофакторная безразмерная характеристика трактора как преобразователя движения в разнообразных условиях.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.