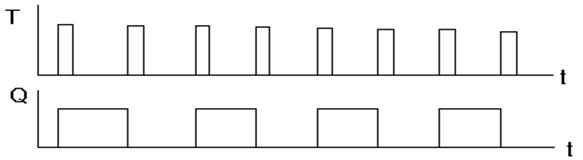
период повторения входных импульсов неизменен:
 |
|
Q(t) |
T |
Q(t+1) |
|
0 |
0 |
0 |
|
0 |
1 |
1 |
|
1 |
0 |
1 |
|
1 |
1 |
0 |
 Очевидно и логическое
уравнение:
Очевидно и логическое
уравнение:
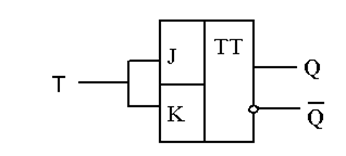
Сравнивая уравнения (3) и (4), нетрудно догадаться, что если соединить входы J и K между собой и узел соединения обозначить буквой T (т.е. положить J = K = T), то уравнение (3) станет тождественным уравнению (4), а это означает, что JK-триггер станет работать как T-триггер:
 |
2. СИНХРОННЫЕ ТРИГГЕРЫ
Для всех синхронных триггеров изменения управляющих сигналов еще недостаточно для срабатывания. Триггер может изменить свое состояние (т.е. выходной сигнал) только после подачи разрешающего синхроимпульса, который подается на отдельный вход. Синхронные триггеры бывают со статическим и динамическим управлением; принципиальная разница в их работе объяснялась выше (см.Введение).
2.1. Синхронный RS-триггер
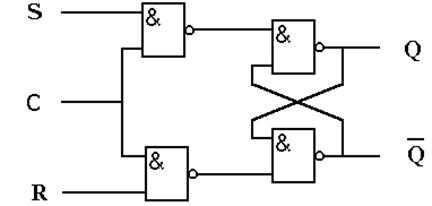 |
Рис.3. Синхронный RS-триггер
Из схемы очевидно, что при С = 0 оконечный каскад, являющийся асинхронным RS-триггером, находится в режиме хранения. Никакие изменения на управляющих входах S и R не изменят его состояния, поскольку на входах триггера будут логические единицы, а он собран на элементах И-НЕ.
Если же на вход С подать синхроимпульс (С=1), то оконечный каскад будет реагировать на изменение сигналов S и R согласно таблице истинности триггера. Эта способность сохраняется в течение всего времени существования синхроимпульса, что является отличительной особенностью триггера со статическим управлением.
Синхронный триггер со статическим управлением
при наличии синхроимпульса ведет себя как
обычный асинхронный. Про такой триггер обычно
говорят, что он п р о з р а ч е н по входам.
Свойство прозрачности синхронного триггера часто является нежелательным. Во-первых, он обладает низкой помехоустойчивостью. Во-вторых, такой триггер нельзя использовать при построении многих устройств: счетчиков,
цифровых автоматов, регистров сдвига и т .п.
Этот недостаток устраняется в синхронных триггерах с динамическим управлением, момент переключения которых определяется фронтом (или спадом) синхроимпульса. Все остальное время триггер нечувствителен к изменению управляющих сигналов.
 |
Первая ступень Вторая ступень
(ведущий триггер) (ведомый триггер)
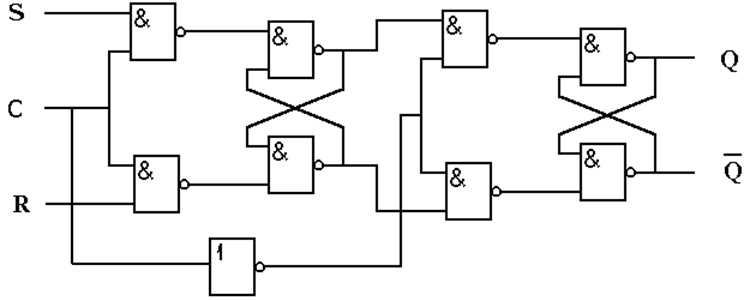
Рис.4. Двухтактный синхронный RS-триггер
Нетрудно сообразить, что при наличии синхроимпульса (С=1) первая ступень прозрачна, в то время как вторая ступень закрыта. В момент исчезновения синхроимпульса первая ступень запирается, но вторая ступень открывается, и информация, которая была на выходе первой ступени в момент снятия синхроимпульса, копируется на выход второй ступени.
Такая двухступенчатая система часто в литературе называется MS-триггером (Master-Slave: ведущий-ведомый).
Сигнал на выходе системы может измениться только в момент спада синхроимпульса, что дает право назвать ее триггером с динамическим управлением. Каждая ступень является в отдельности прозрачной, но система в целом таковой не явяляется.
Если в схему двухтактного RS-триггера ввести перекрестные обратные связи наподобие того, как это сделано на схеме рис.2, то получим двухтактный JK-триггер с динамическим управлением. Аналогичная структура лежит в основе распространенной микросхемы К155ТВ1:
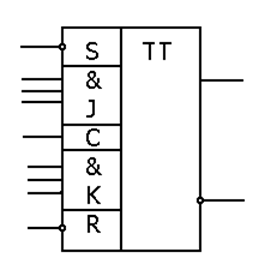 |
Более подробные сведения о способах реализации синхронных JK-триггеров можно получить из [1, стр.181].
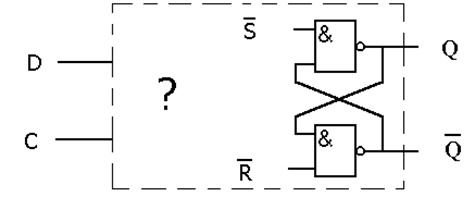
2.2. Синхронный D-триггер со статическим
управлением
D-триггер бывает только синхронным и обычно имеет один управляющий вход (D) и один синхровход (C). Назначение D-триггера – копировать на выход сигнал D-входа при наличии разрешения, поэтому его таблица истинности тривиальна:
|
C |
Q(t) |
D |
Q(t+1) |
|
|
0 |
0 |
0 |
|
0 |
0 |
1 |
0 |
|
0 |
1 |
0 |
1 |
|
0 |
1 |
1 |
1 |
|
|
0 |
0 |
0 |
|
1 |
0 |
1 |
1 |
|
1 |
1 |
0 |
0 |
|
1 |
1 |
1 |
1 |
Столбец сигнала «С» поставлен в таблице первым для удобства ее заполнения: ясно, что при С = 0 имеет место режим хранения, т.е. Q(t+1) = Q(t), а при C = 1 триггер обязан копировать на выход содержимое D-входа, т.е. Q(t+1) = D.
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.