subplot(3,1,2);
y= cos(2*pi*f2*n/Fs);
plot(n,y);
set(gca, 'FontName', 'Times New Roman Cyr', 'FontSize' ,12);
legend('Сигнал с частотой 100 Гц');
subplot(3,1,3);
z=x+y;
plot(n,z);
set(gca, 'FontName', 'Times New Roman Cyr', 'FontSize' ,12);
legend('Сумма двух сигналов');
num=[0.00025];
den=[1 -1.98975 0.9897625];
figure(2);
subplot(211);
plot(n,z);
set(gca, 'FontName', 'Times New Roman Cyr', 'FontSize' ,12);
legend('Сигнал на входе фильтра');
subplot(212);
F1=filter(num,den,z);
plot(n,F1);
set(gca, 'FontName', 'Times New Roman Cyr', 'FontSize' ,12);
legend('Сигнал на выходе фильтра (функция filter)');
subplot(212);
figure(3);
dlsim(num,den,z);
set(gca, 'FontName', 'Times New Roman Cyr', 'FontSize' ,12);
legend(' сигнал на выходе фильтра (функция dlsim)','сигнал на входе фильтра');
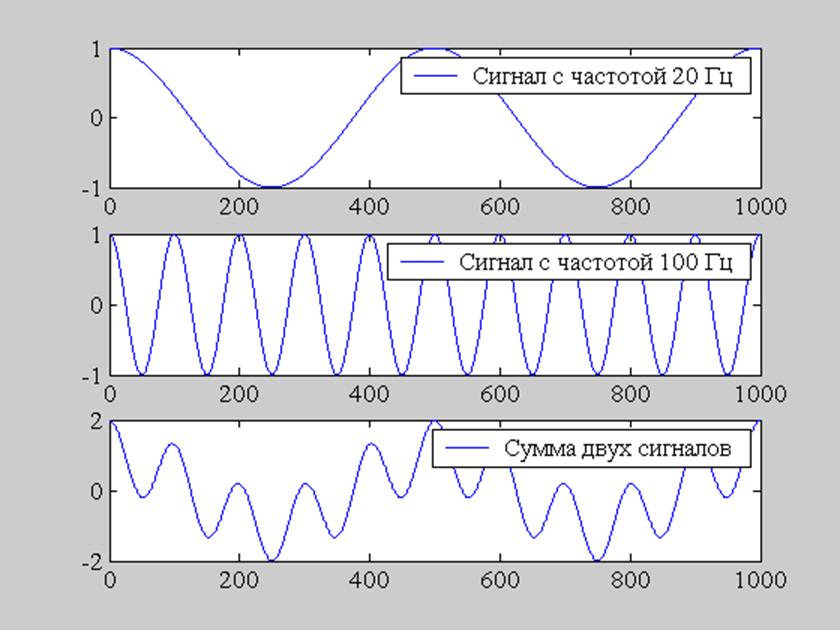
Рис. 7. Графики гармонических сигналов:
а) cos(2*pi*20*n)
б) cos(2*pi*100*n)
в) cos(2*pi*20*n) + cos(2*pi*100*n)
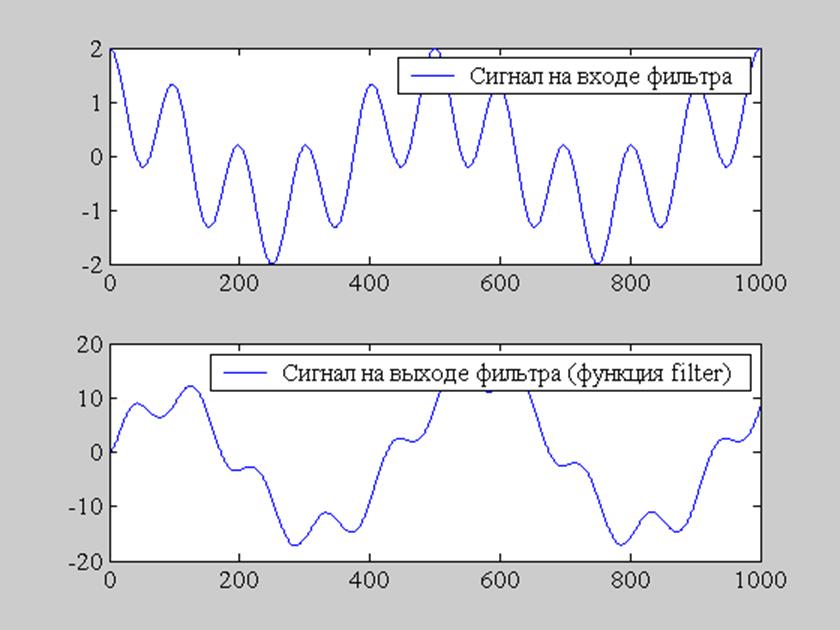
Рис. 8. Сигнал на входе фильтра и на выходе (функция filter()).
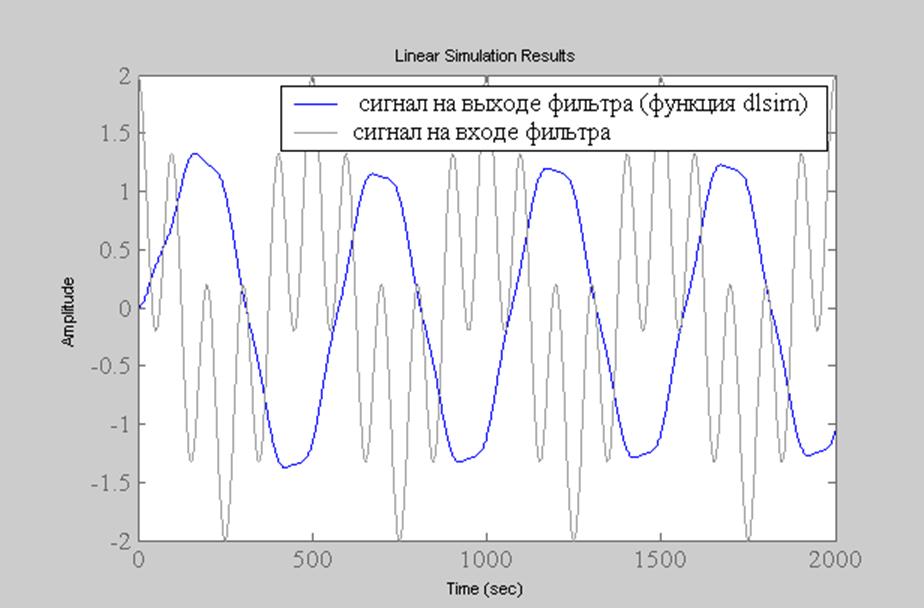
Рис. 9. Сигнал на входе фильтра и на выходе (функция dlsim()).
При подаче гармонического сигнала равного сумме двух дискретных гармоник с частотами 20Гц (выбранная частота входит в полосу пропускания фильтра от 0 до 30 Гц) и 100Гц (выбранная частота входит в полосу задерживания фильтра) на вход системы был найден отклик (выходной сигнал). Фильтр полностью пропустил гармонику с частотой 20Гц, попадающей в полосу пропускания, и подавил гармонику с частотой 100Гц, попадающей в полосу задерживания. Результат на выходе фильтра соответствует виду фильтра – ФНЧ. Функция dlsim() является наиболее удобной в использовании, т.к. позволяет на одном графике получить входной и выходной сигнал, а также позволяет осуществлять удобную навигацию по кривой.
7. Исследование влияния расположения нулей и полюсов на частотную характеристику системы.
a)
Исходные полюса: ![]()
Возьмем полюса: ![]()
Передаточная функция системы:

Листинг М-файла для построения АЧХ:
z=[0];
p=[-0.9986; -0.9912];
[num,den]=zp2tf(z,p,0.00025);
freqz(num,den,1000,10^5);
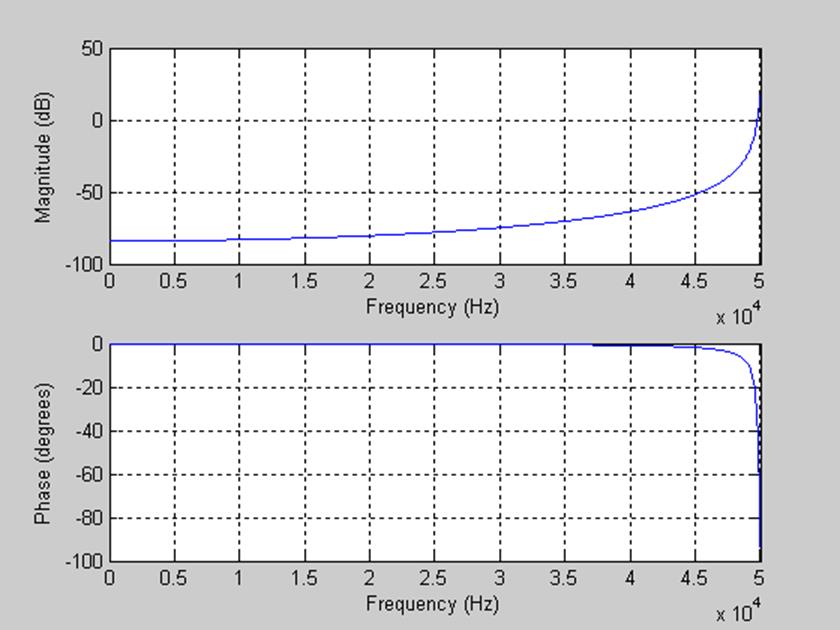
Рис. 10. АЧХ с полюсами ![]()
При исходных полюсах был ФНЧ, сменив знак у полюсов, получили ФВЧ с полосой пропускания от 49500 до 50000 Гц, что видно из графика АЧХ.
b) Исходные полюса: ![]()
Возьмем полюса: ![]()
Передаточная функция системы:

Листинг М-файла для построения АЧХ:
z=[];
p=[0.9986; 0.9912];
[num,den]=zp2tf(z,p,0.00025);
freqz(num,den,1000,10^5);
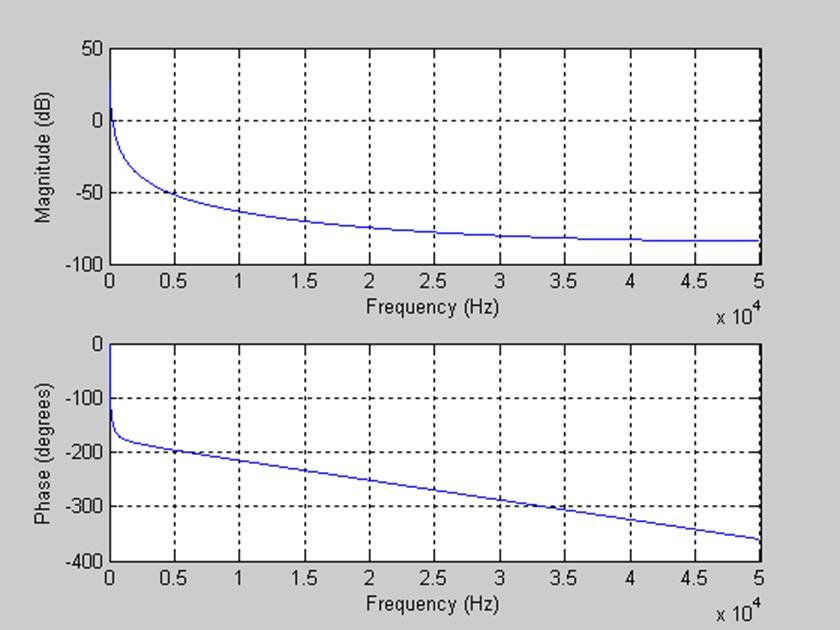
Рис. 11. АЧХ с полюсами ![]() .
.
По полученной АЧХ видно, что по-прежнему остался ФНЧ, причем при добавлении нулей (полюса остались без изменения) изменилась полоса пропускания: в данном случае она от 0 до 45 Гц.
c) Исходные полюса: ![]()
Возьмем полюса: ![]()
Передаточная функция системы:

Листинг М-файла для построения АЧХ:
z=[];
p=[3.9986; 3.9912];
[num,den]=zp2tf(z,p,0.00025);
freqz(num,den,1000,10^5);
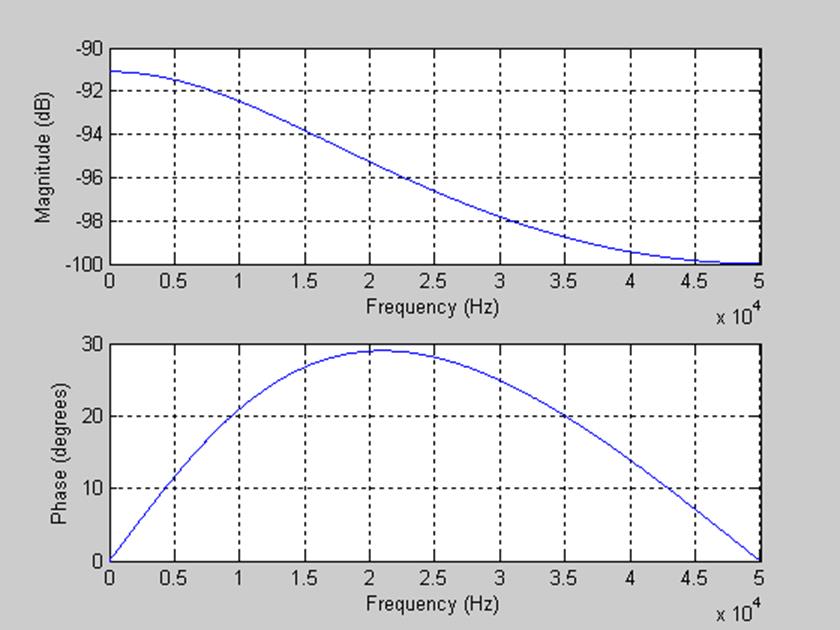
Рис. 12. АЧХ с полюсами ![]() .
.
При данных полюсах и нулях получили ФВЧ с полосой пропускания от 20000 до 50000 Гц.
d) Исходные полюса: ![]()
Возьмем полюса: ![]()
Передаточная функция системы:

Листинг М-файла для построения АЧХ:
z=[];
p=[-4.9986; -4.9912];
[num,den]=zp2tf(z,p,0.00025);
freqz(num,den,1000,10^5);
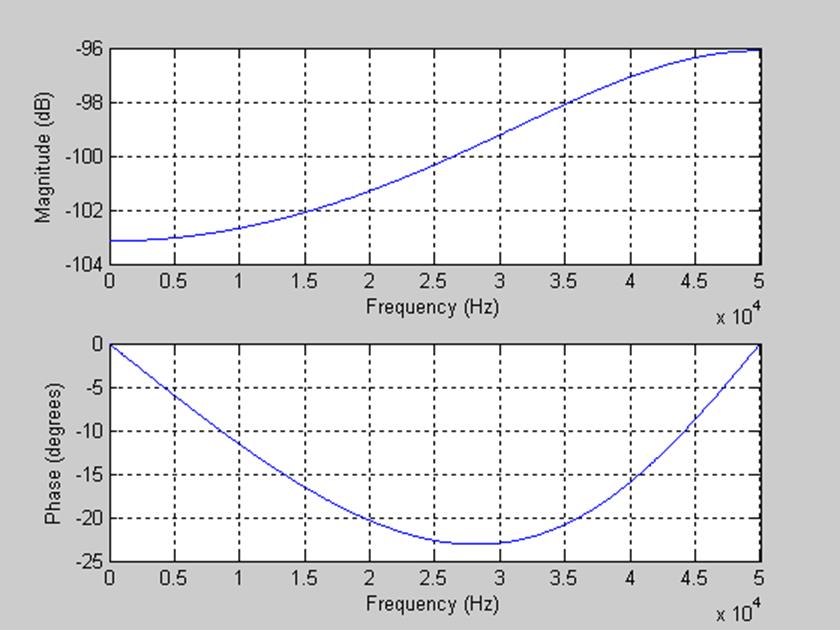
Рис. 13. АЧХ с полюсами ![]() .
.
По полученной АЧХ видно, что это ФНЧ, причем при данных значениях нулей и полюсов полоса пропускания фильтра равна от 0 до 27200 Гц.
Изменение положение полюса влияет на вид ЧХ. Если полюс приближается к единичной окружности, то значение АЧХ возрастает. Если нуль будет приближаться к единичной окружности, то АЧХ будет убывать. Так как нули и полюса определяют ПФ, то их изменение влияет на вид фильтра. Это видно из эксперимента: исходный ФНЧ при изменении полюсов и нулей обращался в ФВЧ. Однако только полюс влияет на вид фильтра, как видно из экспериментов изменение значений нулей влияет только на значения и форму АЧХ, но при этом не изменяет вид фильтра.
8. Определение импульсной характеристики системы и построение её графика при помощи функций impz() и dimpulse().
Листинг М-файла для построения графика импульсной характеристики системы с помощью функции impz() :
b=[0.00025];
a=[1 -1.98975 0.9897625];
impz(b, a, 5000)

Рис. 14. Импульсная характеристика системы (с помощью функции impz()).
Листинг М-файла для построения графика импульсной характеристики системы с помощью функции dimpulse() :
b=[0.00025];
a=[1 -1.98975 0.9897625];
dimpulse(b, a, 5000)
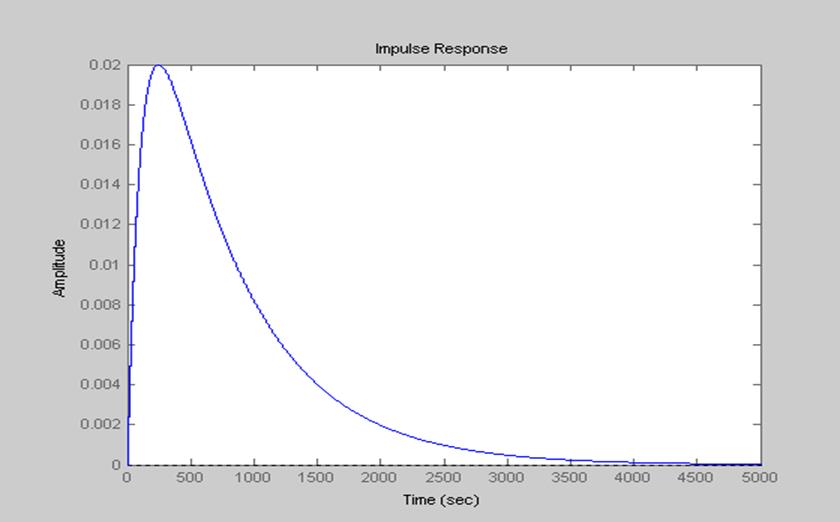
Рис. 15. Импульсная характеристика системы (с помощью функции dimpulse()).
Графики импульсных характеристик, полученных с помощью функций impz() и dimpulse()совпадают с импульсной характеристикой цифрового фильтра. Однако преимущество impz() и dimpulse() очевидно, поскольку, не проводя дополнительных расчетов, можно получить импульсную характеристику системы по ПФ. Кроме того, функция dimpulse() имеет возможность удобной навигации по кривой.
9. Построение графика переходной характеристики фильтра с помощью функции dstep().
Листинг М-файла для построения графика переходной характеристики системы:
b=[0.00025];
a=[1 -1.98975 0.9897625];
dstep(b, a)
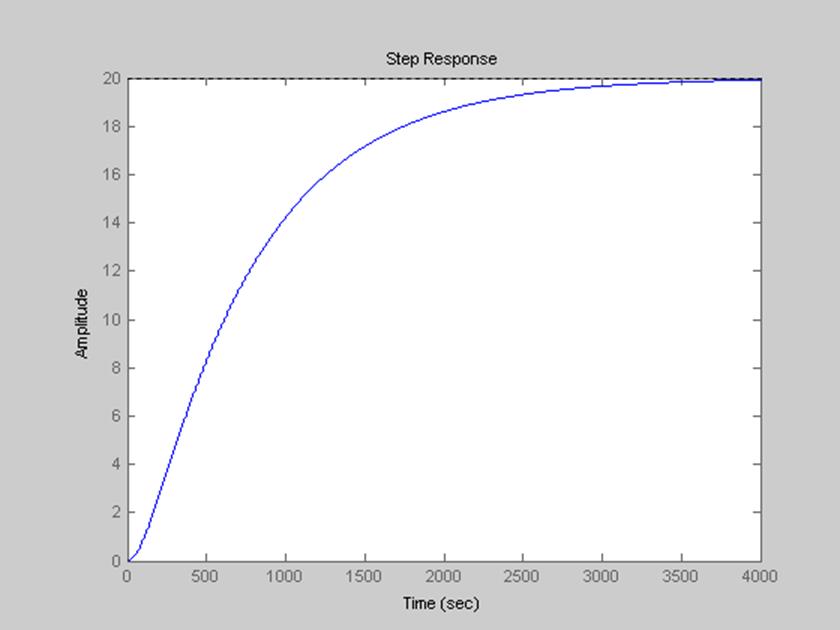
Рис. 16. . Переходная характеристика системы.
Переходная характеристика – реакция (отклик) системы на входной сигнал в виде единичной последовательности при нулевых начальных условиях.
Единичная импульсная последовательность имеет вид:
Через
единичный импульс:  . Если подать на вход
. Если подать на вход  , то на выходе получается импульсная
характеристика
, то на выходе получается импульсная
характеристика ![]() , если учесть линейность
системы, то если на вход подаётся сигнал вида ,
то на выходе будет
, если учесть линейность
системы, то если на вход подаётся сигнал вида ,
то на выходе будет  . Т.е. переходная
характеристика есть сумма импульсных характеристик. Учитывая линейность
системы, получаем связь импульсной и переходной характеристики:
. Т.е. переходная
характеристика есть сумма импульсных характеристик. Учитывая линейность
системы, получаем связь импульсной и переходной характеристики:
 ,
где g[n]- переходная характеристика.
,
где g[n]- переходная характеристика.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.