1). Определить передаточные функции разомкнутой системы Кр(р), а также замкнутой системы Кз(р); спектральную плотность Nэ эквивалентных флуктуаций, приведенных ко входу дискриминатора.
Изобразим структурную схему следящей системы на рис.1 .
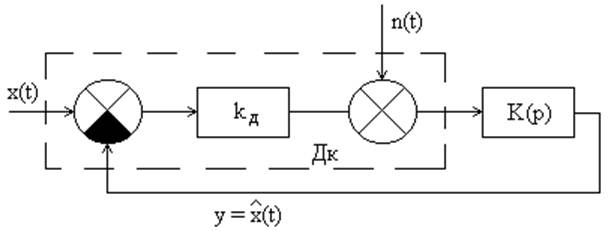
рис. 1
Найдем передаточные функции разомкнутой системы Кр(р), а также замкнутой системы Кз(р), используя параметры системы описанные в задании на курсовой проект.
![]() - число интегрирующих звеньев.
- число интегрирующих звеньев.
![]() - число форсирующих звеньев.
- число форсирующих звеньев.
![]() - число инерционных звеньев.
- число инерционных звеньев.
Таким образом, передаточная функция разомкнутой системы Кр(р) определяется по формуле (1.1).
 (1.1)
(1.1)
Тогда передаточная функция замкнутой системы Кз(р) определяется по формуле (1.2).
 (1.2)
(1.2)
где ![]() , с-1 - добротность системы по скорости.
, с-1 - добротность системы по скорости.
Спектральная плотность эквивалентного шума nэ(t) определяется по формуле (1.3).
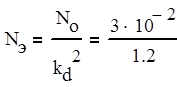
![]() (1.3)
(1.3)
![]() ,
, 
2). Произвести оптимизацию следящей системы по параметру Ku, используя критерий минимума среднего квадрата ошибки; определить оптимальное значение шумовой полосы Fш системы и минимально достижимую ошибку слежения emin; построить графики зависимостей результирующей средней квадратичной ошибки слежения, а также ее составляющих (динамической и шумовой) от полосы.
Оптимизация системы по критерию минимума среднего квадрата ошибки сводится к нахождению значения параметра Ku, при котором обеспечивается минимум величины (2.1) [1].
![]() (2.1)
(2.1)
при заданной структуре системы (вид передаточной функции Кр(р) (1.1) и значения параметров kд, Т1 и Т2).
Составляющая ед в формуле (2.1) определяет динамическую ошибку, обусловленную инерционностью следящей системы по отношению к меняющемуся задающему воздействию (при детерминированном воздействии ошибка также детерминированная). Динамическая ошибка ед(t) определяется параметром х'о задающего воздействия, а также порядком астатизма и добротностью К1 системы. и находится по формуле (2.2).
 , с (2.2)
, с (2.2)
Составляющая s2е в формуле (2.1) определяет дисперсию шумовой ошибки еn(t), обусловленную помехой n(t). Дисперсия шумовой ошибки рассчитывается по формуле (2.3).
 (2.3)
(2.3)
где Fш - шумовая полоса следящей системы в Гц, определяемая формулой (2.4).
 (2.4)
(2.4)
где ![]() - квадрат АЧХ замкнутой системы,
определяемая формулой (2.6).
- квадрат АЧХ замкнутой системы,
определяемая формулой (2.6).
Найдем ![]() , для этого произведем некоторые
преобразования. Заменив в формуле (1.2) параметр р на iw, получаем выражение
для комплексного коэффициента передачи замкнутой системы (2.5).
, для этого произведем некоторые
преобразования. Заменив в формуле (1.2) параметр р на iw, получаем выражение
для комплексного коэффициента передачи замкнутой системы (2.5).
 (2.5)
(2.5)
Квадрат АЧХ замкнутой системы определяется формулой (2.6).
![]()


 (2.6)
(2.6)
Найдем шумовую полосу следящей системы (2.4) и дисперсию шумовой ошибки (2.3). Для этого можно упростить интеграл (2.4), если представить подынтегральное выражение в виде (2.7) [1].
 (2.7)
(2.7)
где полиномы имеют вид (2.8).
![]() (2.8)
(2.8)
![]()
Тогда коэффициенты полинома имеют вид (2.9).
![]()
![]()
![]() (2.9)
(2.9)
![]()
![]()
После преобразования вычисление интеграла сводится к (2.10).
 (2.10)
(2.10)
значение которого определяется формулой (2.11).
 (2.11)
(2.11)
Тогда нахождение Fш и s2е сводится к формулам (2.12).
 (2.12)
(2.12)
Теперь можно определить оптимальное значение шумовой полосы Fш opt системы и минимально достижимую ошибку слежения еmin. Для этого необходимо продифференцировать выражение (2.1) по параметру Кu и приравнять производную (2.13) к нулю.
 (2.13)
(2.13)
Решение уравнения (2.13) дает оптимальное значение коэффициента передачи интегратора Ku opt.
![]() , 1/В
, 1/В
При подстановки Ku opt в формулы (2.12) получаем численные значения
![]()
 , Гц
, Гц
 , мкс2
, мкс2
Найдем теперь оптимальное значение коэффициента передачи интегратора Ku opt численным методом для проверки полученного результата.
Возьмем интеграл (2.4) для нахождения Fш и найдем s2е по формуле (2.3). Fш и s2е зависят от Ku (2.14).
 (2.14)
(2.14)
![]()
![]()
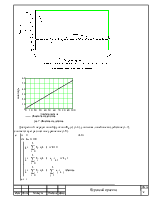
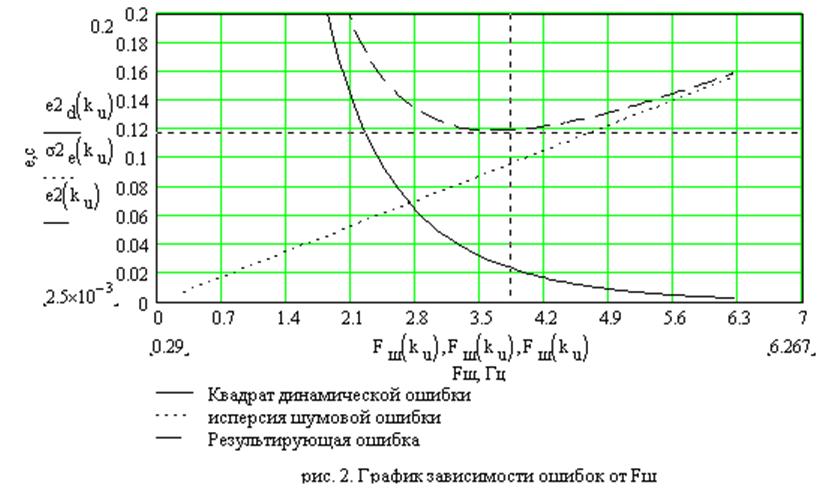
Найдем минимум выражения (2.1) графическим способом на рис. 2.
![]()
![]()
![]()
По графику найдем следующие значения.
![]() , 1/В
, 1/В
![]() , Гц
, Гц
![]() , с2
, с2
![]() , с
, с
Физический смысл существования оптимального значения полосы Fш объясняется следующим образом. При малых значениях Fш основной вклад в результирующую ошибку вносит ед, а при больших Fш - шумовая составляющая еn рис.2. Поэтому существует оптимальное значение шумовой полосы Fш opt, при котором результирующая ошибка минимальна [1].
3). Построить логарифмические амплитудно-частотную (ЛАХ) и фазочастотную (ЛФХ) характеристики разомкнутой системы и определить по ним запас устойчивости по амплитуде и фазе при оптимальном значении параметра Ku opt.
С учетом найденного оптимальном значении параметра Ku opt запишем передаточную функцию разомкнутой системы Кр(р) (1.1) в виде (3.1).
 (3.1)
(3.1)
Найдем АЧХ разомкнутой системы Кр(p) (3.1) в виде (3.3).
 (3.2)
(3.2)
 (3.3)
(3.3)
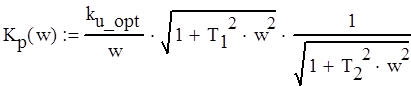
Найдем ЛАХ разомкнутой системы Кр(p) по известной АЧХ (3.3) по формуле (3.4).
![]()
![]() (3.4)
(3.4)
![]()
Асимптотическая ЛАХ разомкнутой системы Кр(p) определяется по формуле (3.5).
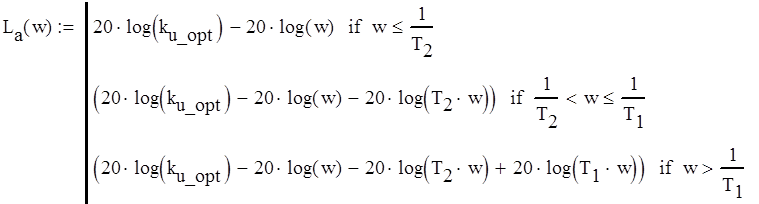 (3.5)
(3.5)
Построим L(w) и La(w) на рис. 3.
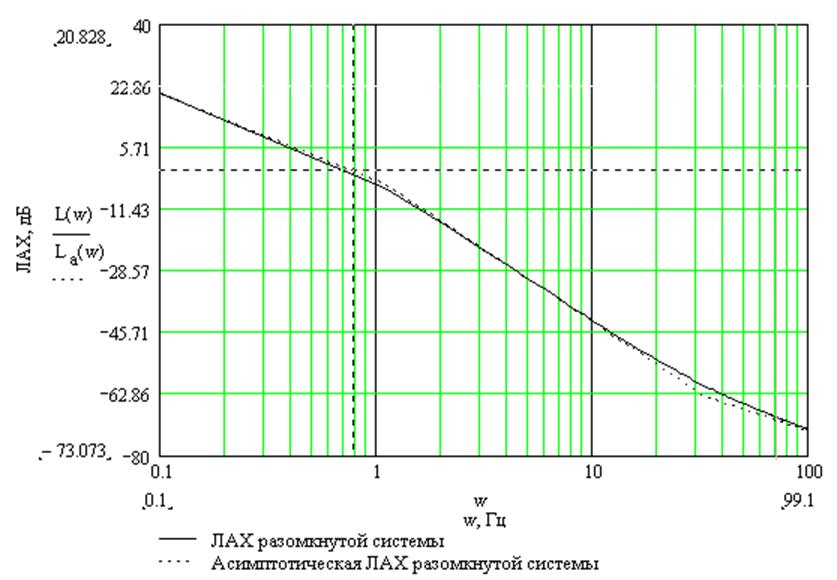
По графику La(w) - асимптотической ЛАХ разомкнутой системы на рис. 3 определим частоту среза wср (частота, на которой значение ЛАХ равно 0 дБ).

![]() , Гц
, Гц
Найдем ЛФХ разомкнутой системы Кр(p) как аргумент (3.2) по формуле (3.6).
![]() (3.6)
(3.6)
График f(w) изображен на рис. 4.
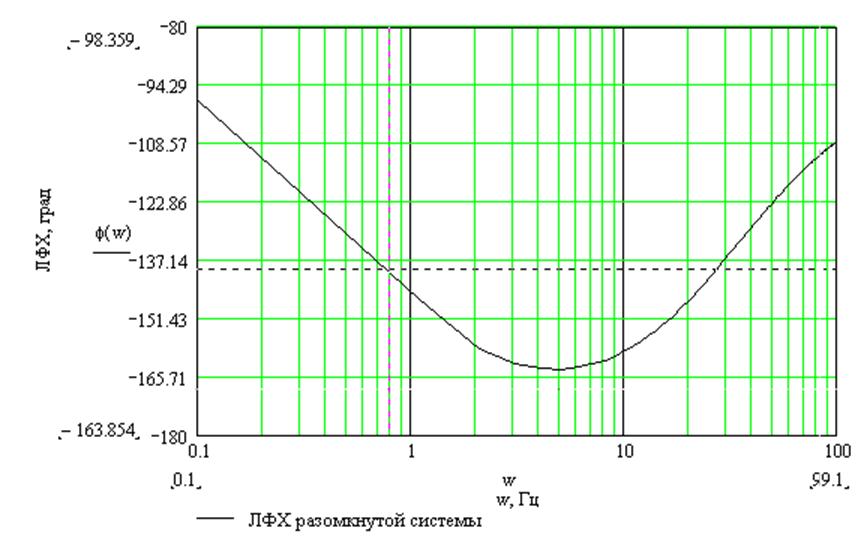
Определим запас устойчивости системы.
Запас по фазе определяется выражением (3.7)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.