Найдем обратное преобразование Лапласа от y(p). Для этого необходимо найти корни характеристического уравнения.
![]()
![]()
Т. к. корни простые (не комплексные), не кратные, и имеется один нулевой корень, то выражение для y(t) при t≥0 имеет вид:
![]()
![]()
![]()
![]()
Переходная характеристика будет иметь вид:

рис.3 «График переходного процесса системы»
1.4. Используя символьные вычисления MathCad , получим выражения
и построим графики весовой и переходной характеристик.
|
|
|
|
|
|
рис.4 «График переходного процесса и весовой функции системы»
Как видно из графика, найденные значения весовой и переходной характеристик верны.
1.5. Рассчитаем и построим графики амплитудно-частотной и фазо-
частотной характеристик, логарифмических частотных
характеристик элемента. Проверим в MathCad .
Последовательность нахождения частотных характеристик:
- сделать замену в передаточной функции p = j·ω
- освободиться от мнимых чисел в знаменателе
- раскрыть скобки и привести подобные члены, и разделить выражение в числителе на сумму действительного и мнимого полиномов
- записать выражение для действительного и мнимого полиномов
- записать выражение для логарифмической амплитудно-частотной характеристики
- построить графики частотных характеристик.
Передаточная функция:


![]()
где U(ω) – вещественная частотная характеристика
V(ω) – мнимая частотная характеристика
Подставим значения коэффициентов:


Построим амплитудно-частотную характеристику:
![]()
рис.5«График амплитудно-частотной характеристики»
Построим амплитудно-фазовую характеристику (годограф):
рис.6«Годограф»
Построим фазо-частотную характеристику:
рис.7«График фазо-частотной характеристики»
Построим логарифмическую амплитудно-частотную характеристику:
![]()
рис.8«График логарифмической амплитудно-частотной характеристики»
Проверим правильность расчетов частотных характеристик устройства с помощью MathCAD.
Запишем выражения для построения частотных характеристик с помощью встроенных функций MathCAD.
A1(w) - амплитудно-частотная характеристика
|
|
|
|
|
|
|
|
рис.9«График амплитудно-частотной характеристики»
φ1(ω) - фазо-частотная характеристика
|
|
|
|
рис.10«График фазо-частотной характеристики»
![]() логарифмическая
амплитудно-частотная характеристика.
логарифмическая
амплитудно-частотная характеристика.
|
|
|
|
|
|
|
|
рис.11«График логарифмической амплитудно-частотной характеристики»
Проверка показала, что частотные характеристики объекта управления построены верно.
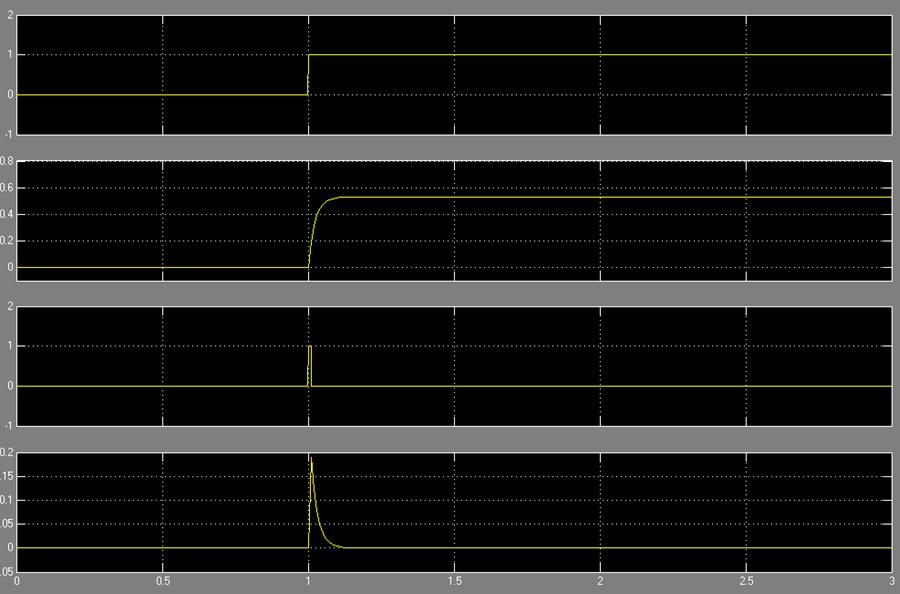
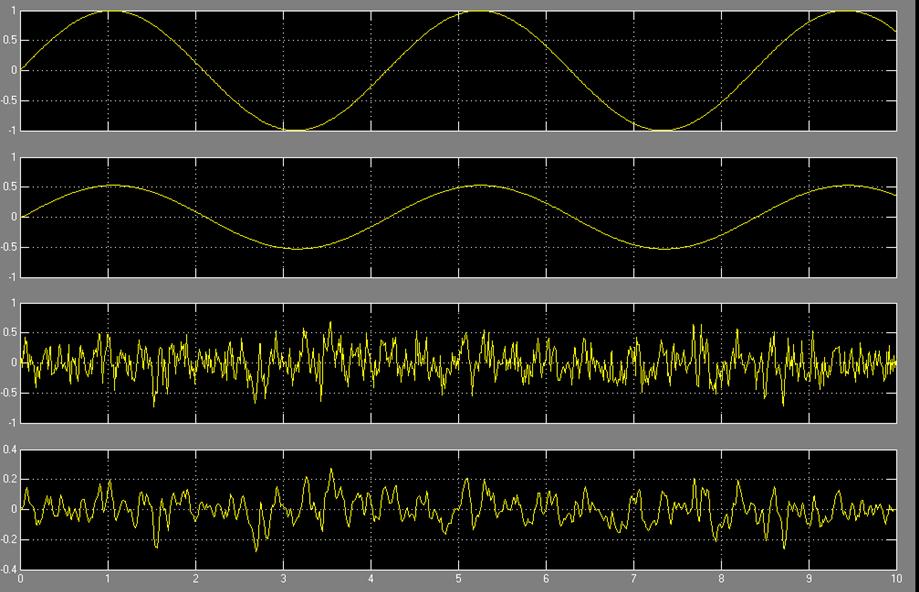
1.6. В Matlab составим схему и произведём моделирование прохождения через исследуемый элемент ступенчатого , импульсного и синусоидального сигнала .
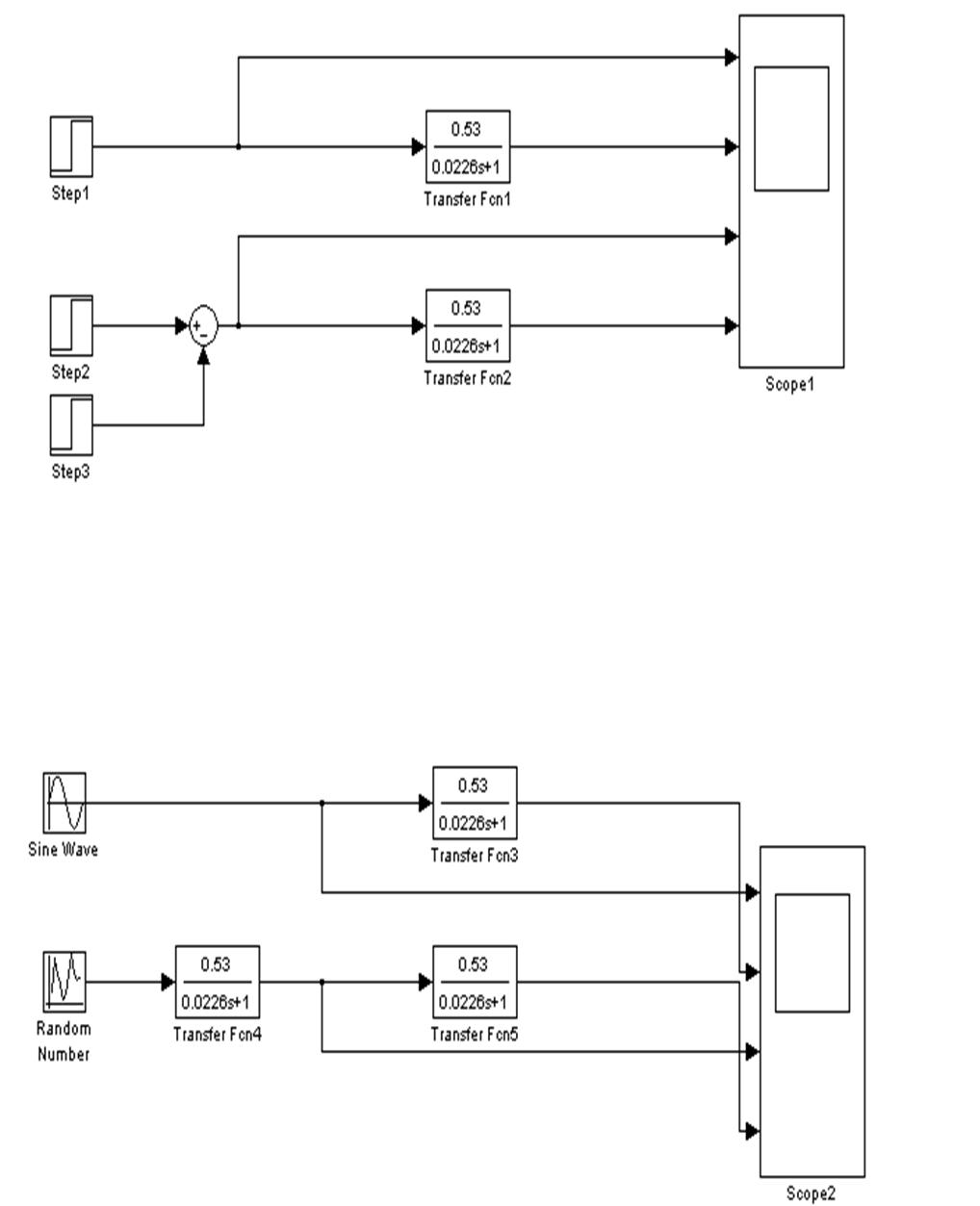
Осциллоскоп №1
Осциллоскоп №2
Задание 3.
3.1. Найдем передаточную функцию электропривода по каналу «напряжение якоря - скорость электропривода»
Электропривод можно разделить на две составляющие: электрическую и механическую части. Электрическая часть описывается уравнениями Кирхгофа, а механическая через моменты инерции, нагрузки и сопротивления.
Запишем уравнение для механической части электропривода:
где Мдв – момент на валу двигателя
Мс – момент сопротивления

Запишем уравнение для электрической части электропривода:
где еа – противоЭДС в якоре
 - присутствует
только при изменении тока в якоре
- присутствует
только при изменении тока в якоре
![]()
В данном случае инерционность системы определяется моментом
инерции J. В связи с этим время переходных процессов
мало, поэтому ![]() =0.
=0.
![]()
![]()
где Мс = const
Запишем систему уравнений в отклонениях:
![]()
![]()
![]() (1)
(1)
 (2)
(2)
Из уравнения (2) выразим ia и подставим в (1):
 (3)
(3)
Разделив уравнение (3) на СE, получим:
Введем обозначения:

Получим дифференциальное уравнение, описывающее электропривод:
Следовательно, электропривод является апериодическим звеном первого порядка.
3.2. Найдем передаточную функцию электропривода.
Преобразуем уравнение по Лапласу.
![]()
![]()
 - передаточная функция электропривода по каналу «напряжение якоря – скорость
электропривода»
- передаточная функция электропривода по каналу «напряжение якоря – скорость
электропривода»
3.3. Определим количественные оценки параметров математической
модели электропривода.
Исходные данные:
1. Тип двигателя ДМП 11 (постоянного тока)
2. Номинальная мощность Рн = 2,8 [кВт]
3. Номинальное напряжение якоря Uн = 220 [В]
4. Номинальный ток якоря Iн = 14,5 [А]
5. Номинальный крутящий момент Мн = 14,95 [н·м]
6. Максимальная скорость вращения n = 1790 [об/мин]
7. Момент инерции якоря Ja = 0,04 [кг·м²]
8. Сопротивление обмотки якоря Ra = 7,59 [Ом]
9. Момент инерции нагрузки Jн = 105 [кг·м²]
10. Коэффициент редукции Кред = 120
Рассчитаем коэффициент противоЭДС:
 [В·с/рад]
[В·с/рад]
Рассчитаем коэффициент момента:
 [кгм/А]
[кгм/А]
Найдем полный момент инерции:
 [кг·м²]
[кг·м²]
Найдем коэффициенты передаточной функции электропривода:
 [с]
[с]
Тогда передаточная функция примет вид:
3.4. Построим графики переходных процессов электропривода.
Решив дифференциальное уравнение, описывающее электропривод, получим уравнение движения эл. двигателя при начальной скорости ω0 при входном сигнале Ua.

Рассмотрим три режима работы электропривода:
- «пуск» - начальная скорость ω0 = 0 [рад/с], входное напряжение Ua = Uн = 47 [В]
- «останов» - начальная скорость ω0 = ωн = 62,8 [рад/с], входное напряжение Ua = 0 [В]
- «переход» - переходной процесс при пуске двигателя при Ua = 0,4Uн и дальнейшем ступенчатом увеличении напряжения до Ua = 0,8Uн.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.