














Оглавление
Исходные данные..................................................................... .............................3
1. Передаточная функция разомкнутого контура системы.. 3
2. Передаточная функция замкнутого контура системы.. 4
3. Характеристическое уравнение замкнутой системы.. 4
4. Устойчивость по критерию Гурвица. 4
5. Устойчивость по критерию Рауса. 6
6. Устойчивость по корням характеристического уравнения. 6
7. Действительная и мнимая составляющие характеристического полинома. 7
8. Годограф Михайлова. 7
9. Следствие из критерия Михайлова. 8
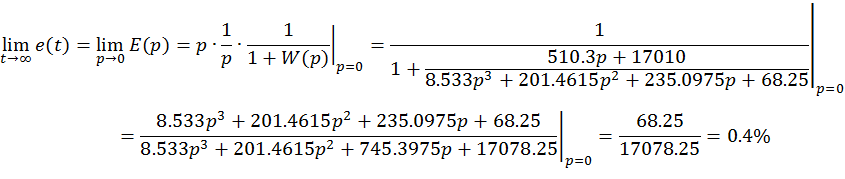
10. Установившаяся ошибка................................................................................ 9
11. Корневые показатели качества...................................................................... 9
12. Асимптотическая логарифмическая амплитудно-частотная характеристика разомкнутой системы.. 10
13. Метод прямого программирования. 12
14. Параметрическая оптимизация системы.. 13
14.1 ПИД-регулятор, настроенный по критерию минимум интеграла от взвешенного модуля ошибки (ИВМО) 13
14.2 Регулятор, настроенный по критерию симметричного оптимум (СО) и/или модального оптимума (МО) 15
15. Установившаяся ошибка. 17
16. Сравнительная таблица. 17
17. Список использованных источников. 18
Исходные данные
Определение варианта курсовой работы:
![]() –
число, образованное двумя последними цифрами зачетной книжки;
–
число, образованное двумя последними цифрами зачетной книжки;
![]() –
номер начальной буквы фамилии студента в алфавите (А – 01, Б – 02, … Я – 33);
–
номер начальной буквы фамилии студента в алфавите (А – 01, Б – 02, … Я – 33);
Номер варианта: ![]()
Так как номер варианта четный, выбираем вид схемы рис.1.а
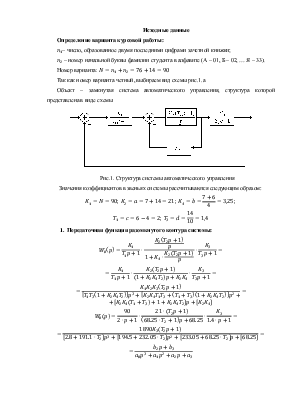
Объект – замкнутая система автоматического управления, структура которой представлена в виде схемы
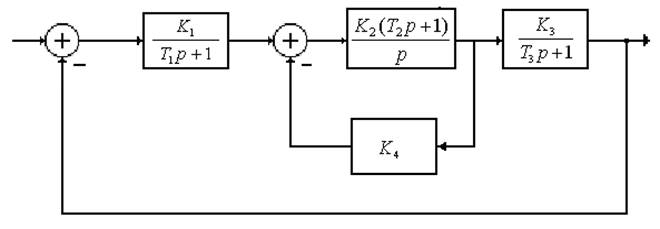
Рис.1. Структура системы автоматического управления
Значения коэффициентов в звеньях системы рассчитываются следующим образом:
![]()
![]()




![]()



Система будет устойчива, если ![]() и
и
![]()
![]()
![]()
![]()


Составим систему уравнений:
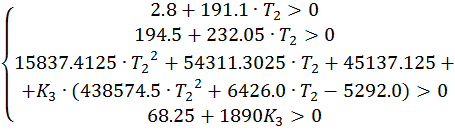
![]()

Построим график этих зависимостей:
![]()
![]()
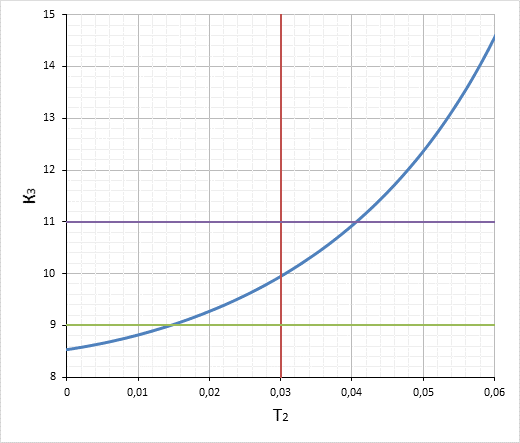
Рис.2. Схема границы устойчивости
Устойчивые параметры: ![]()

![]()

Неустойчивые параметры: ![]()
![]()

Устойчивая:
![]()
![]()
![]()
![]()
![]()
![]()
Система устойчива, т.к все элементы первого столбца таблицы Рауса > 0
Неустойчивая:
![]()
![]()
![]()
![]()
![]()
![]()
Система неустойчива, т.к. элементы первого столбца таблицы Рауса имеют разные знаки.
Устойчивая.
![]()
![]()
Так как действительные части корней отрицательные, то система устойчива
Неустойчивая.
![]()
![]()
Так как действительные части корней p2,3 положительные, то система неустойчива.
Устойчивая.
![]()
![]()
![]()
Действительная составляющая: ![]()
Мнимая составляющая: ![]()
Неустойчивая.
![]()
![]()
![]()
Действительная составляющая: ![]()
Мнимая составляющая: ![]()
Формулировка: Автоматическая система управления, описываемая
уравнением п-го порядка, устойчива, если при изменении w 0 до ¥
характеристический вектор системы ![]() повернется против
часовой стрелки на угол np/2, не обращаясь при этом в нуль.[1]
повернется против
часовой стрелки на угол np/2, не обращаясь при этом в нуль.[1]
Устойчивая система: Построим годограф и оценим устойчивость системы.
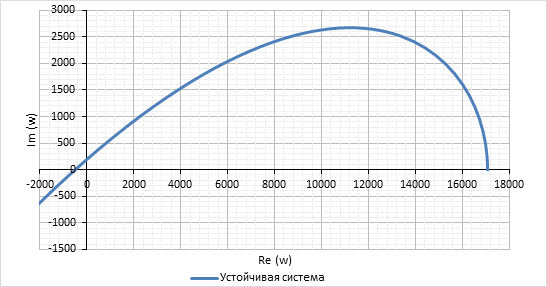
Рис3. Годограф Михайлова устойчивой системы
Система устойчива, т.к. проходит 3 квадранта последовательно, не обращаясь в ноль.
Неустойчивая система: Построим годограф и оценим устойчивость системы.
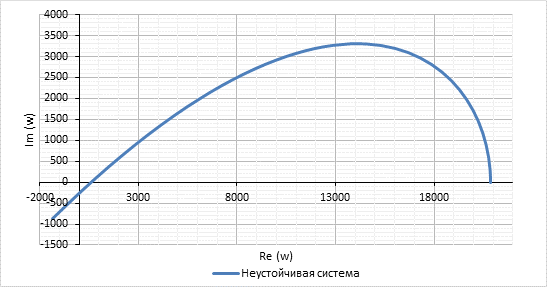
Рис.4. Годограф Михайлова неустойчивой системы
Система неустойчива, т.к. проходит 3 квадранта непоследовательно.
Формулировка: Система устойчива, если действительная и мнимая части
характеристической функции ![]() обращаются в нуль поочередно, т.е. если корни
уравнений
обращаются в нуль поочередно, т.е. если корни
уравнений![]() и
и
![]() перемежаются и
перемежаются и ![]() и
и ![]() [1]
[1]
Устойчивая:
Действительная
составляющая: ![]()
Мнимая составляющая: ![]()
![]()
![]()
![]()
![]()
![]()
Система устойчива, т.к.
корни уравнений ![]() и
и ![]() перемежаются и
перемежаются и
![]() и
и ![]() .
.
Неустойчивая:
Действительная
составляющая: ![]()
Мнимая составляющая: ![]()
![]()
![]()
![]()
![]()
![]()
Система неустойчива, т.к.
корни уравнений ![]() и
и ![]() не перемежаются.
не перемежаются.
При подаче на вход единичного ступенчатого сигнала (для устойчивой системы):
Для устойчивого
случая: ![]()
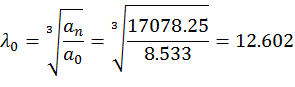
1) Среднее геометрическое значение модулей корней
![]()
Этот показатель также можно приближенно вычислить через крайние коэффициенты характеристического уравнения:
2) Степень устойчивости h – это расстояние от мнимой оси до действительной части ближайшего к ней корня. Степень устойчивости характеризует быстродействие системы и позволяет приблизительно определить ожидаемое время переходного процесса.
![]()
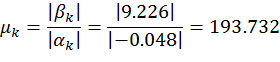
3) Степень колебательности определяется отношением мнимой части к действительной

Устойчивая


Первая асимптота имеет наклон 0 дБ/дек, т.к. нет интегрирующих и дифференцирующих звеньев в исходной передаточной функции.
![]()
Определим
сопрягающие частоты по формуле: ![]()
![]()
![]()
![]()
![]()
Неустойчивая


Первая асимптота имеет наклон 0 дБ/дек, т.к. нет интегрирующих и дифференцирующих звеньев в исходной передаточной
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.