

ГЛАВА 5. КЛАССИФИКАЦИЯ, ВЫБОР И РАСЧЕТ РЕГУЛЯТОРА ТЕМПЕРАТУРЫ ТЕСТА
5.1 Классификация регуляторов
Регулятор температуры теста в системе предназначен для поддержания температуры теста в заданных пределах, которые обусловлены технологической необходимостью для выпечки хлеба. Точность поддержания необходимой температуры отражается на качестве конечного продукта, а при недопустимых отклонениях температуры от заданного значения (несоблюдения технологии) конечный продукт, а в том числе и сырьё (тесто) не будут соответствовать установленным нормам качества. В результате будет нанесён предприятию материальный ущерб, а также невыполнение своевременно договоров перед партнёрами.
Поэтому регулирование технологического процесса является очень важной частью мероприятий производства, и выбор регулятора напрямую отражается на качестве продукции. Настройки регулятора должны быть такими, чтобы показатели переходного процесса были оптимальны. Наиболее предпочтителен колебательный затухающий процесс с допустимым максимальным отношением и приемлемым временем перерегулирования.
Государственная система промышленных приборов и средств автоматизации (ГСП) представляет собой рационально организованную совокупность приборов и устройств, удовлетворяющих принципам агрегатирования и предназначенных для построения автоматизированных систем измерения, контроля, регулирования и управления технологическими процессами в различных отраслях промышленности.
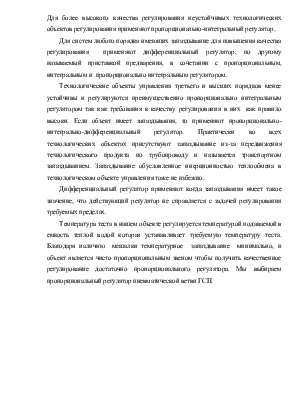
Существует большое количество признаков классификации изделий в системе ГСП. Наиболее удобной и информативной является иерархическая структура ГСП, построенная на основе функционально-целевого признака. В ней вся система разделена на 4 ветви: электрическую, пневматическую, гидравлическую и ветвь приборов прямого действия, работающих без вспомогательной энергии. Выделим место искомого регулятора в системе ГСП. В соответствии с требованиями, предъявляемыми системой управления к регулятору, выбираем пневматическую ветвь ГСП, ее структурная схема представлена на рисунке 5.1. В соответствии с приведенной схемой, искомый регулятор относится к вторичным приборам.


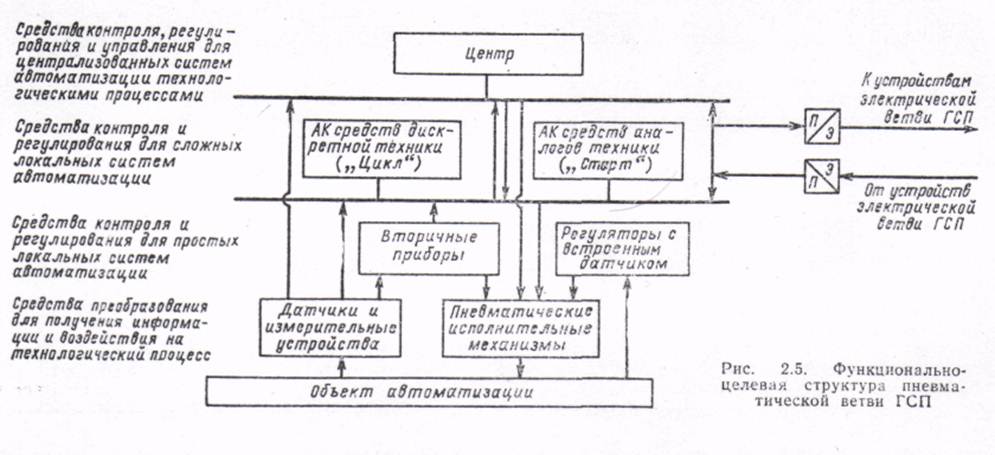
Рисунок 5.1 Функционально-целевая структура пневматической ветви ГСП
 |
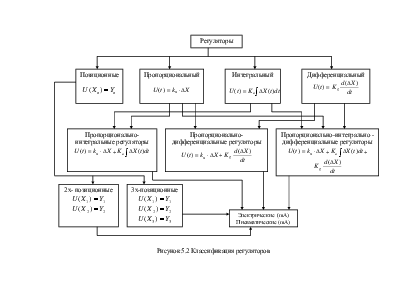
Произведем классификацию регуляторов, для этого в качестве первого классификационного признака примем закон регулирования и выделим в соответствии с ним простейшие регуляторы. На следующем уровне классификации поместим сложные регуляторы, в которых применяется 2 и более простейших закона регулирования. Третий уровень классификации проведем по признаку вида используемой энергии: электрические и пневматические. Полная структурная схема классификации приведена на рисунке 5.2.
Системы подлежащие автоматизации описываются уравнением которое имеет имеет вид.
![]() =
=![]() (5.1)
(5.1)
Левая часть уравнения описывает систему регулирования, а правая часть описывает технологический объект регулирования, который может быть первого, второго, третьего и высших порядков. Системы первого и второго порядков определяются аналитически, системы третьего порядка тоже возможно анализировать математическими вычислениями. Системы высших порядков определяются экспериментально: получают статическую и динамическую характеристики объекта и на основе их выбирают тип применяемого регулятора и при подачи на объект испытательной функции настраивают регулятор.
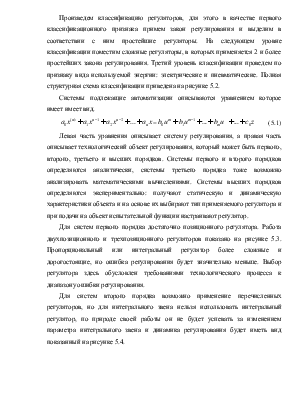
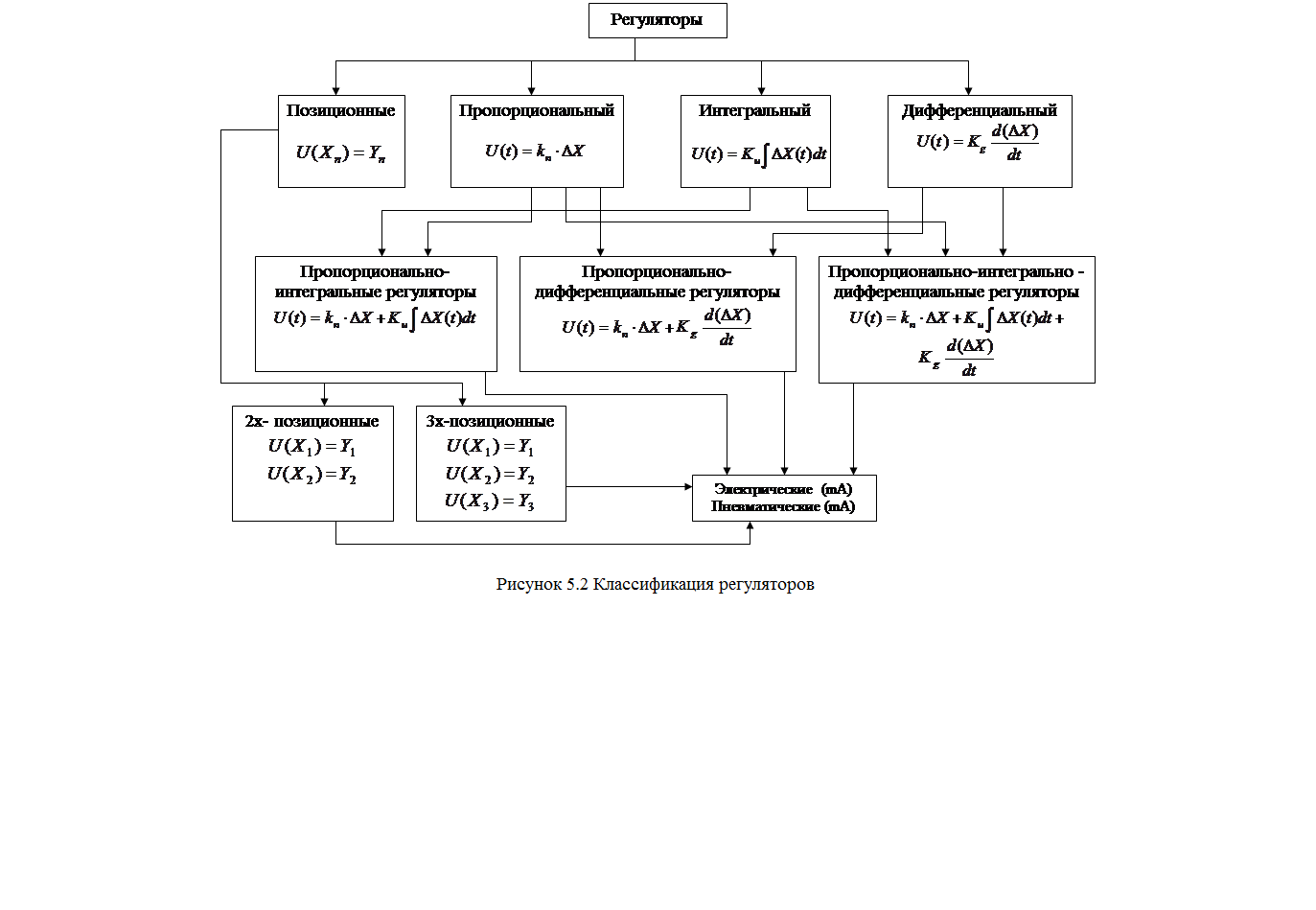
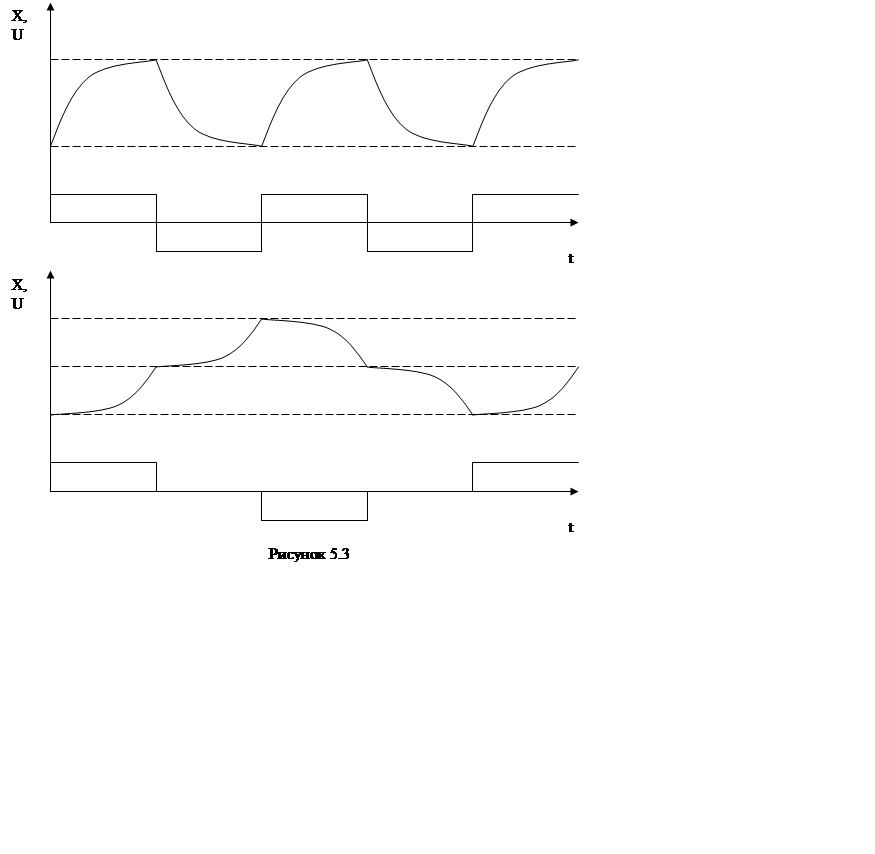
Для систем первого порядка достаточно позиционного регулятора. Работа двухпозиционного и трехпозиционного регуляторов показано на рисунке 5.3. Пропорциональный или интегральный регулятор более сложные и дорогостоящие, но ошибка регулирования будет значительно меньше. Выбор регулятора здесь обусловлен требованиями технологического процесса к диапазону ошибки регулирования.
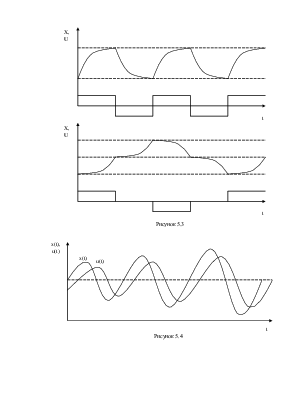
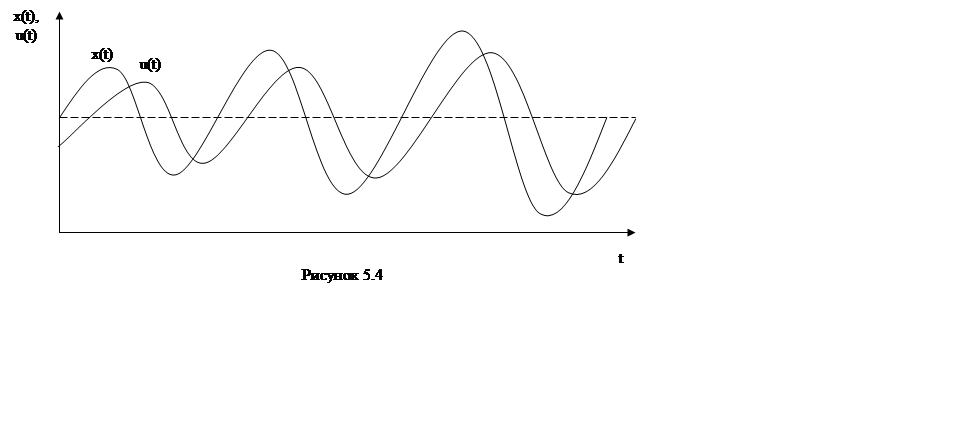
Для систем второго порядка возможно применение перечисленных регуляторов, но для интегрального звена нельзя использовать интегральный регулятор, по природе своей работы он не будет успевать за изменением параметра интегрального звена и динамика регулирования будет иметь вид показанный на рисунке 5.4.
 |
|||
 |
|||
Для систем любого порядка имеющих запаздывание для повышения качества регулирования применяют дифференциальный регулятор, по другому называемый приставкой предварения, в сочетании с пропорциональным, интегральным и пропорционально интегральным регулятором.
Технологические объекты управления третьего и высших порядков менее устойчивы и регулируются преимущественно пропорционально интегральным регулятором так как требования к качеству регулирования в них как правило высоки. Если объект имеет запаздывания, то применяют пропорционально-интегрально-дифференциальный регулятор. Практически во всех технологических объектах присутствуют запаздывание из-за передвижения технологического продукта по трубопроводу и называется транспортном запаздыванием. Запаздывание обусловленное инерционностью теплообмена в технологическом объекте управления тоже не избежно.
Дифференциальный регулятор применяют когда запаздывания имеет такое значение, что действующий регулятор не справляется с задачей регулирования требуемых пределах.
Температура теста в нашем объекте регулируется температурой подаваемой в емкость теплой водой которая устанавливает требуемую температуру теста. Благодаря наличию мешалки температурное запаздывание минимально, и объект является чисто пропорциональным звеном чтобы получить качественное регулирование достаточно пропорционального регулятора. Мы выбираем пропорциональный регулятор пневматической ветви ГСП.
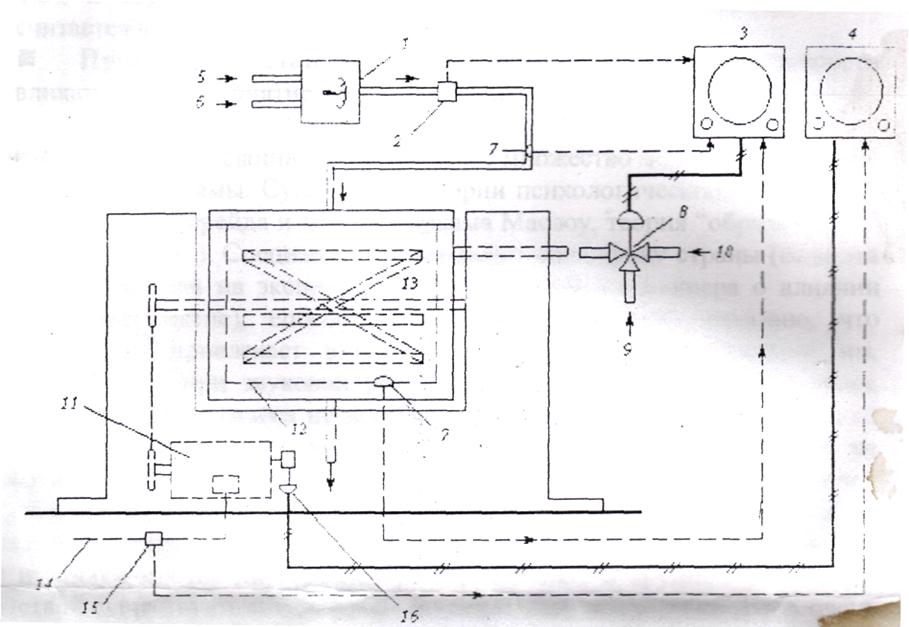
Рисунок 5.5. Система регулирования тестомесильной машины
1 - смесительный клапан; 2 - расходомер; 3 - регулятор температуры теста; 4 - регулятор консистенции теста; 5 - холодная вода; 6 - сильно охлаждённая вода; 7 - термобаллон; 8 - трёхходовой смесительный клапан; 9 - расходомер холодной воды; 10 - горячая вода; 11 - двигатель; 12 - водяная рубашка; 13 - лопатки; 14 - силовой ввод; 15 - датчик нагрузки; 16 - регулирование работы привода.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.