ВВЕДЕНИЕ
Автоматическое регулирование представляет собой наиболее эффективный принцип автоматики при частичной автоматизации, когда технические средства автоматики осуществляют лишь простые функции управления, связанные с измерением, анализом, контролем различных физических величин и отработкой решений, принятых оператором в виде уставок, программ или других сигналов управления.
В настоящее время наиболее эффективно разрабатываются и модернизируются станки с автоматическим управлением. Это позволяет не только освободить человека от излишнего труда, но и повышает качество произведенных работ, порой исключает критические ошибки в управлении опасными объектами. Поэтому наиболее актуальным в наши дни является развитие отрасли машиностроения систем автоматического управления и регулирования.
Постоянное совершенствование и подробная классификация устройств дает возможность инженеру наиболее функционально подобрать тот или иной элемент автоматики, ссылаясь на необходимые для нужного режима работы характеристики. Самостоятельная разработка систем из элементов управления и регулирования предоставляет возможность проектирования автомата с такими характеристиками, которых не было раньше. Поэтому синтез систем помогает в развитии промышленности и позволяет достичь необходимых результатов и производственных достижений.
Цель данного курсового проекта – исследование элементов системы управления гидравлическим прессом, исходная схема которого приведена на рисунке.
Принцип автоматического управления заключается в следующем. Пуск схемы управления осуществляется кнопкой 1КУ. Через нормально закрытые контакты обмотка промежуточного реле 1Р получит питание и замкнет свои контакты 1Р1-1Р4. После отпускания кнопки питание будет проходить через контакты 1Р1. Электромагнит 4ЭК получит питание, вследствие этого ретурные цилиндры соединяться с магистралью низкого давления и результатом этого будет предварительное смыкание пресса под низким давлением.
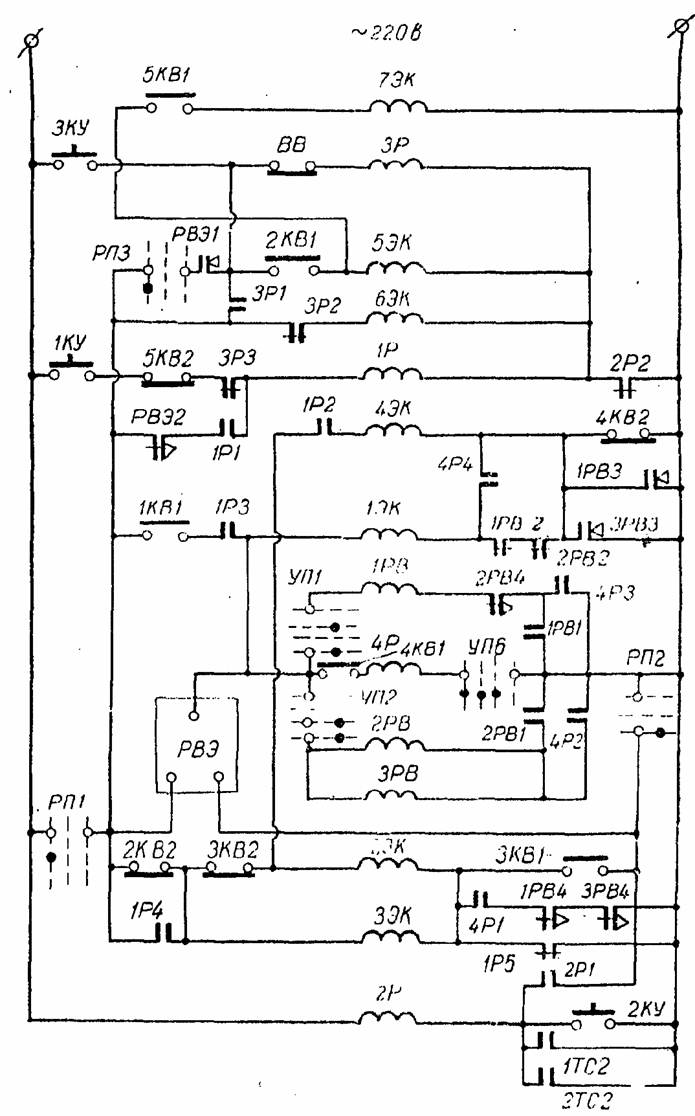
1КУ – 3КУ – кнопки управления; 1КВ1 – 5КВ 2 – контакты путевых и конечных выключателей; 1Р – 4Р – промежуточное реле; 1Р1 – 4Р4 – контакты реле 1Р – 4Р; 1РВ – 3РВ, РВ9 – маятниковые и электронное реле времени; 1РВ1 – 3РВ4, РВЭ1 – РВЭ2 – контакты реле времени; УП1 – УП6 – контакты переключателя вида подпрессовок УП; РП1 – РП3 - контакты переключателя рода работы РП; 1ЭК – 6ЭК – электромагниты гидравлических клапанов; 7ЭК – электромагнит пневматического клапана; ВВ – выключатель весов
Рисунок 1 – Электрическая схема автоматическим управлением прессом
При дальнейшем движении, когда до полного смыкания останется несколько сантиметров, подвижная плита замкнет контакты 1КВ1. Через контакты РП2 и РП1 включится реле времени РВЭ и получит питание электромагнит 1ЭК. Поэтому дальнейшее смыкание будет происходить под действием высокого давления. Управление замедлением в случае необходимости осуществляется путевым выключателем 3КВ независимо от других выключателей.
Управление подпрессовками осуществляются маятниковыми реле времени 1РВ, 2РВ, 3РВ. Команда на электромагниты клапанов, при помощи которых осуществляется управление разъемом и смыканием прессформы подается конечным выключателем 4КВ.
После промежутка времени, 4Р1 и 4Р4 разомкнуться, электромагниты 2ЭК и 3ЭК обесточаться. Электромагнит 4ЭК включится и смыкание прессформы происходит под низким давлением. По истечении времени РВЭ1 замкнуться, РВЭ2 разомкнуться – произойдет разъем пресса.
По предложенной электрической схеме необходимо подобрать конкретные элементы данной схемы, провести классификацию, произвести расчет и модернизацию данных элементов. В состав курсового проекта включены элементы, предложенные к анализу и исследованию. Отдельные узлы рассматривали:
Петров И .С. – Кнопки управления
Есипов С. В. – Электромагнит пневматического клапана
Щукарев А. А. – Электронное реле времени
Кудряшов А. Н – Электромагнит гидравлического клапана
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.