





РОССИЙСКИЙ ЗАОЧНЫЙ ИНСТИТУТ ТЕКСТИЛЬНОЙ И ЛЕГКОЙ ПРОМЫШЛЕННОСТИ
Кафедра электротехники и автоматизированных промышленных установок
КУРСОВАЯ РАБОТА ПО ДИСЦИПЛИНЕ: «УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДАМИ»
ТЕМА: Анализ работы системы управления автоматизированным многодвигательным электроприводом постоянного тока
Выполнил: студент 4 курса
ЭМФ 2102
Уч. шифр
Серпухов 2008
![]() ЗАДАНИЕ НА
КУРСОВУЮ РАБОТУ.
ЗАДАНИЕ НА
КУРСОВУЮ РАБОТУ.
Для технологического оборудования, оснащенного автоматизированным электроприводом с электродвигателем постоянного тока независимого возбуждения:
1. Рассчитать и построить диаграмму ступенчатого пуска приводного электродвигателя с числом ступеней 3. При расчете принять Uя Uян = 220В. и Uв Uвн = 220В.;
2. Определить величины дополнительных пусковых сопротивлений, включаемых в цепь якоря приводного электродвигателя;
3. Разработать принципиальную электрическую схему управления ступенчатым пуском приводного электродвигателя в функции скорости. Кратко описать работу схемы.
4. Разработать принципиальную электрическую схему управления ступенчатым пуском приводного электродвигателя, в функции тока. Кратко описать работу схемы.
5. Разработать принципиальную электрическую схему управления ступенчатым пуском приводного электродвигателя в функции времени. Кратко описать работу схемы.
ДАНО:
Технические данные электродвигателей постоянного тока серии П
с номинальной скоростью вращения nн = 1500 об/мин и номинальным напряжением Uн=220 В
(значения сопротивлений обмоток указаны при температуре 20°С)
РН =4,5 - номинальная мощность двигателя, кВт;
Iя=25,4 - номинальный ток двигателя, А;
Р=4 - число пар полюсов электродвигателя;
GD2 =0,18- маховой момент двигателя, кг*м2;
Rя=0,403 - сопротивление обмотки якоря, Ом;
Rдп=0,17 - сопротивление обмотки дополнительных полюсов, Ом;
RСЕР=0,0441 - сопротивление последовательной (сериесной) обмотки якоря, Ом;
Rв=109 - сопротивление обмотки возбуждения, Ом.
Электродвигатель постоянного тока (ДПТ) не допускает прямого пуска при подключении обмотки якоря на полное напряжение питающей сети, так как возникающий при этом бросок тока превышает допустимое для коллектора значение. По условиям коммутации коллектора пусковой ток Iп электродвигателя постоянного тока нормального исполнения может составлять Iп = (2-2,5)Iя =27- При номинальном значении напряжения на обмотке возбуждения пусковой момент ДПТ также составляет
Мп = (2-2,5)*Мн=31,32. Для ограничения пускового тока ДПТ нужно на время пуска снижать напряжение источника питания обмотки якоря или включать последовательно с обмоткой якоря дополнительное сопротивление Rдоп.. Обычно используют сопротивление Rдоп., состоящее из нескольких последовательно соединенных ступеней Rд1 Rд2, ..., RДN. В начале пуска в цепь якоря включены все ступени сопротивления Rдоп. =Rд1 + Rд2 +...+ RДN. По мере разгона ступени сопротивления Rдоп. поочередно отключают при помощи пусковых реле.
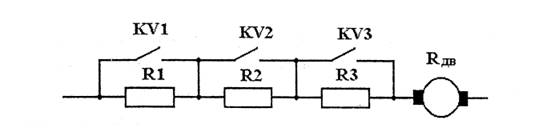
Рис 1.
Таким образом, пуск ДПТ осуществляется в несколько ступеней; при этом двигатель переводится с одной искусственной характеристики на другую. В конце пуска сопротивление Rдоп. полностью шунтируется (Rдоп.=0) контактами пусковых реле и двигатель работает на естественной механической характеристике с частотой вращения, соответствующей моменту сопротивления на его валу Мc.
На рис. 2 приведена пусковая диаграмма электродвигателя постоянного тока независимого возбуждения, включающая естественную механическую характеристику электродвигателя с независимым возбуждением (4); искусственные пусковые механические характеристики ДПТ (1, 2, 3), получаемые при введение в цепь якоря дополнительных сопротивлений; механическую характеристику приводной машины (5).
Рис. 2. Пусковая диаграмма электродвигателя постоянного тока
Каждой искусственной характеристике соответствует определенное сопротивление в якорной цепи. Пусковая диаграмма характеризуется пределами изменения момента двигателя при пуске - величинами Мп и М1, а также числом пусковых ступеней. Чем больше ступеней, тем меньше пределы изменения момента при пуске, тем плавней происходит процесс разгона двигателя. Чем больше максимальный пусковой момент Мп, тем выше значение ускорение двигателя. Величина момента переключения М1 должна превышать максимально возможное значение момента сопротивления Мс настолько, чтобы не затягивать процесс пуска из-за малых ускорений перед переключением ступеней. Можно рекомендовать выбирать значение М, из условия М1 = (1,2 - 1,5)-Мсмах. Горизонтальные отрезки прямых линий между характеристиками 1 и 2, 2 и 3, 3 и 4 показывают переключение двигателя с одной характеристики на другую при отключении соответствующей ступени пускового сопротивления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.